When I was a kid, my basement workshop was full of my grandfather's tools so I had everything I needed to build whatever I could imagine. I grew up tinkering, building small electric vehicles, and playing with Lego robotics sets. I went on to pursue my interest in engineering at Cornell University, where I received my Bachelor of Science in Electrical and Computer Engineering in 2019. In college, I was a part of multiple engineering project teams including the Baja Racing Team, and my own team that competed in a NASA Micro-g Tools Competition. After graduating, I went on to get my a Masters of Engineering in Systems Engineering also from Cornell while working full time at a large aerospace company.
Now, I am a multidisciplinary engineer with 4 years of skills and experience in electrical, mechanical, software, and systems fields. I’ve held roles in automotive, aerospace, and mobile machinery industries both domestically and abroad. My entrepreneurial spirit has led me into multiple startups including my own, where I’ve developed an understanding for customer-centric business strategy. I enjoy developing a strong business case and leading teams to create targeted and creative solutions, especially in the field of robotics. I excel in fast-paced, collaborative, multidisciplinary environments focused on innovation and new business.
Contact Me
Drill Press
Project Date:
2020
Age:
23
Project Type:
Mechatronics
Since graduating I've moved so many times that it didn't make sense to buy large, heavy, and expensive tools and machinery, not to mention my workshop has typically been constrained to a small space in the places I've lived. I wanted a drill press, but I didnt want a big heavy one that wasn't easy to move, so I built this one. This drill press was made using a CNC Z-axis and a 500W motor, which I mounted to an aluminum frame made of plate and right-angle bar. The motor goes up and down using a 3D printed gearset and handcrank to spin the ballscrew on the z-axis. This drill press isn't heavy duty, but its a nice variable speed, light, and portable drill press for making perpendicular wholes in anything from plastic to aluminum. Check out my youtube video to see the build process and it in action.
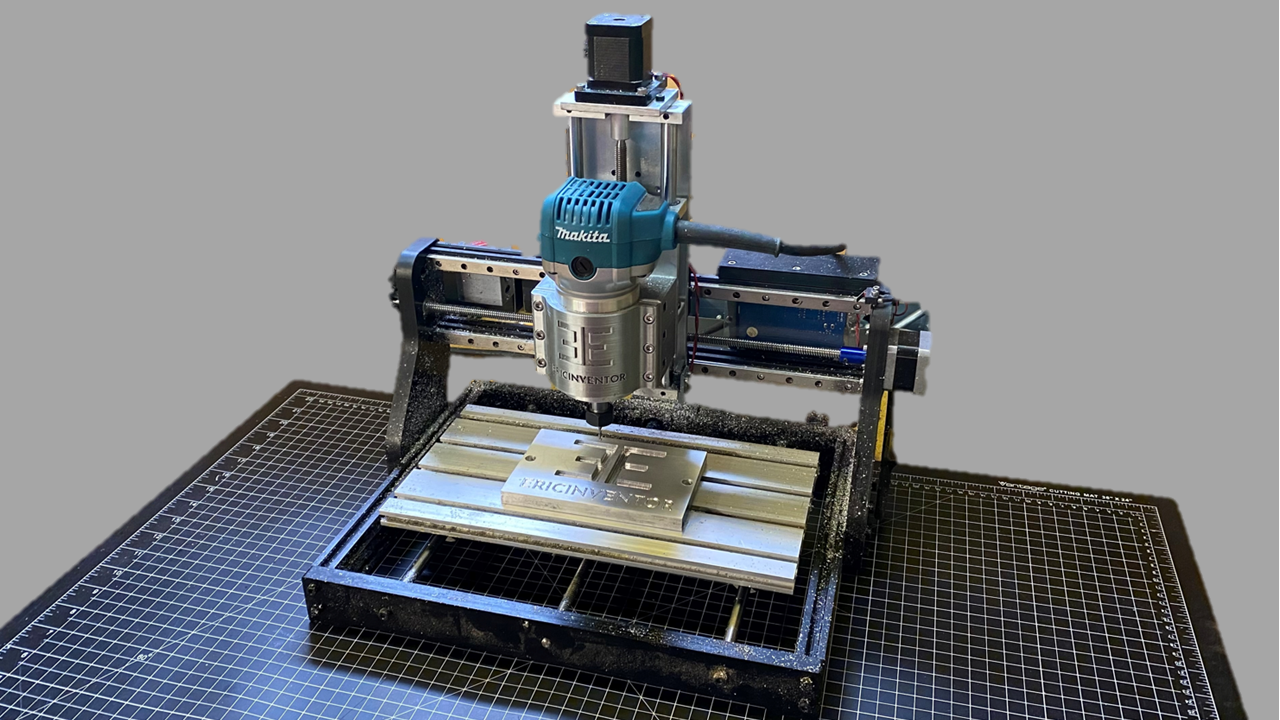
Desktop CNC
Project Date:
2020
Age:
23
Project Type:
Mechatronics
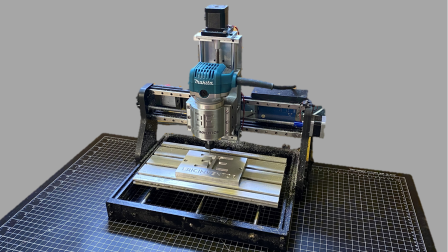
This project became a necessity after all my 3D printed parts used in drivetrains for my electric vehicles just kept failing. The plastic pulleys kept melting when they got hot, or were getting worn to quickly. The goal was to be able to mill aluminum pulleys on a small desktop CNC without breaking the bank. I started off buy buying a cheap chinese CNC, called the Sainsmart Genmitsu 3018 for $300. Then over the course of about a year I started upgrading the components to make it capable of milling aluminum at a non glacial pace. The main modifications were upgrading the Y-axis rails to higher-quality rectangular rails that were stiffer, upgrading the Z-axis, and upgrading the spindle to a more powerful router. What I ended up with is a ~$600 desktop CNC that is very good at cutting 2-D profiles out of aluminum plate. This is perfect for making pulleys, brackets, mounts, and aluminum-engraved gifts! I have used this machine to mill parts for many of my other projects. Someday I want to build a desktop-sized mini lathe also.
Check out the Youtube video below for more details on the upgrades, and all the links to the parts in the description.
Linear Actuator
Project Date:
2022
Age:
25
Project Type:
Mechatronics
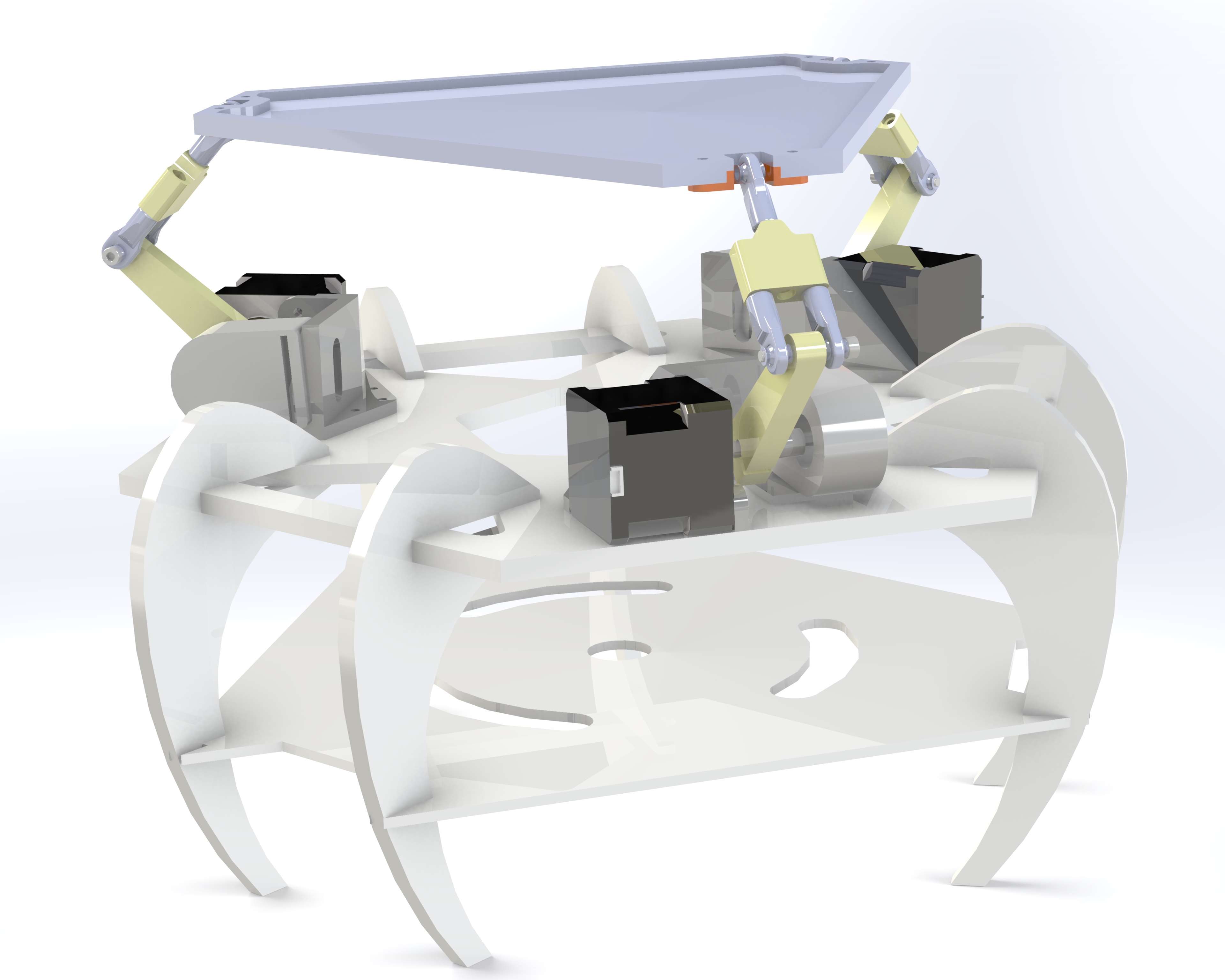
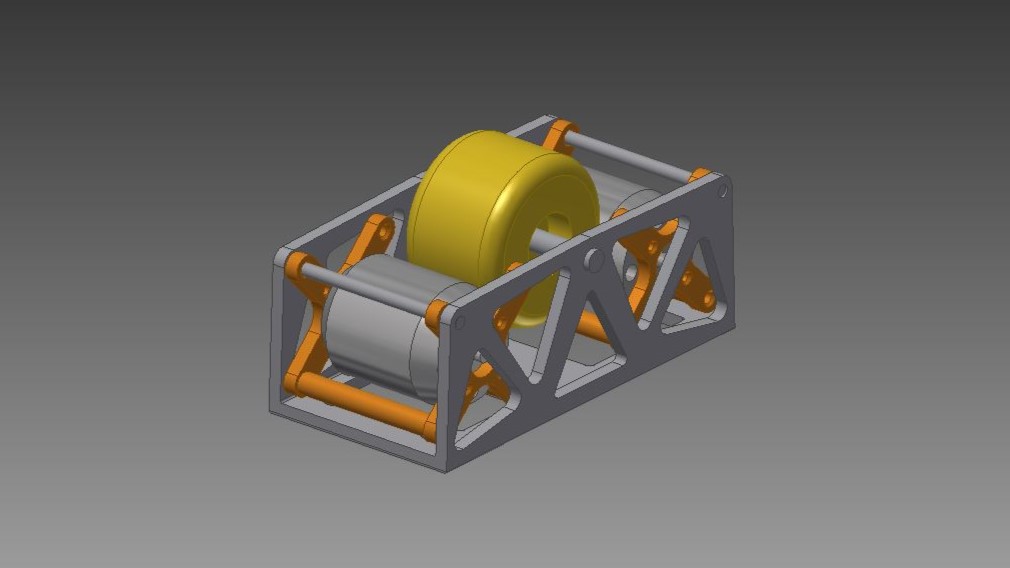
One of the companies I worked for, Moog, makes huge electro-mechaincal linear actuators for massive flight simulators used to train miliatry and commerical pilots. These 6-DOF stewart platforms are incredibly agile, and can manipulate very large loads at very high velocities. Moog makes some of the best performing actuators of this kind, but they are extremely expensive, and totally unnafforable to hobbyists/makers. The main applications for these types of actuators in the hobbyist/maker world are race simulators, flight simulators, and home automation (think secret bookcase or staircase, for example). In the case of the hobbyist race and flight simulators, these actuators need to be able to handle relaitvely high loads (moving a human) at decently high speeds in order to recreate motion of a car or airplane at high speeds. My goal with this project was to build a high-load, high-speed actuator at a reasonable price, let's say less than $1000. My other goal, was to make it very sexy, fully integrated--no boxy looking components or t-slotted frame assemblies. I paired a ~2000W brushless outrunner motor with an absolute encoder and an O-drive motor controller designed for precision robotic motion control. A ballscrew turns to drive the ball-nut forward and backward, extending or retracting the piston rod. I have just barely put this acuator to the test, but I know that it can lift me (~700N) at a decent speed (50mm/s)! There is plenty more to do with this actuator, inlcluding reinforcing the 3D printed rod ends with an aluminum sub-frame, so I can test thing thing with even higher loads. Check out the Youtube shorts videos below to see it in action
A full length Youtube video on this build should be coming soon!
Electric Ripstik
Project Date:
2019
Age:
22
Project Type:
Electric-Vehicles
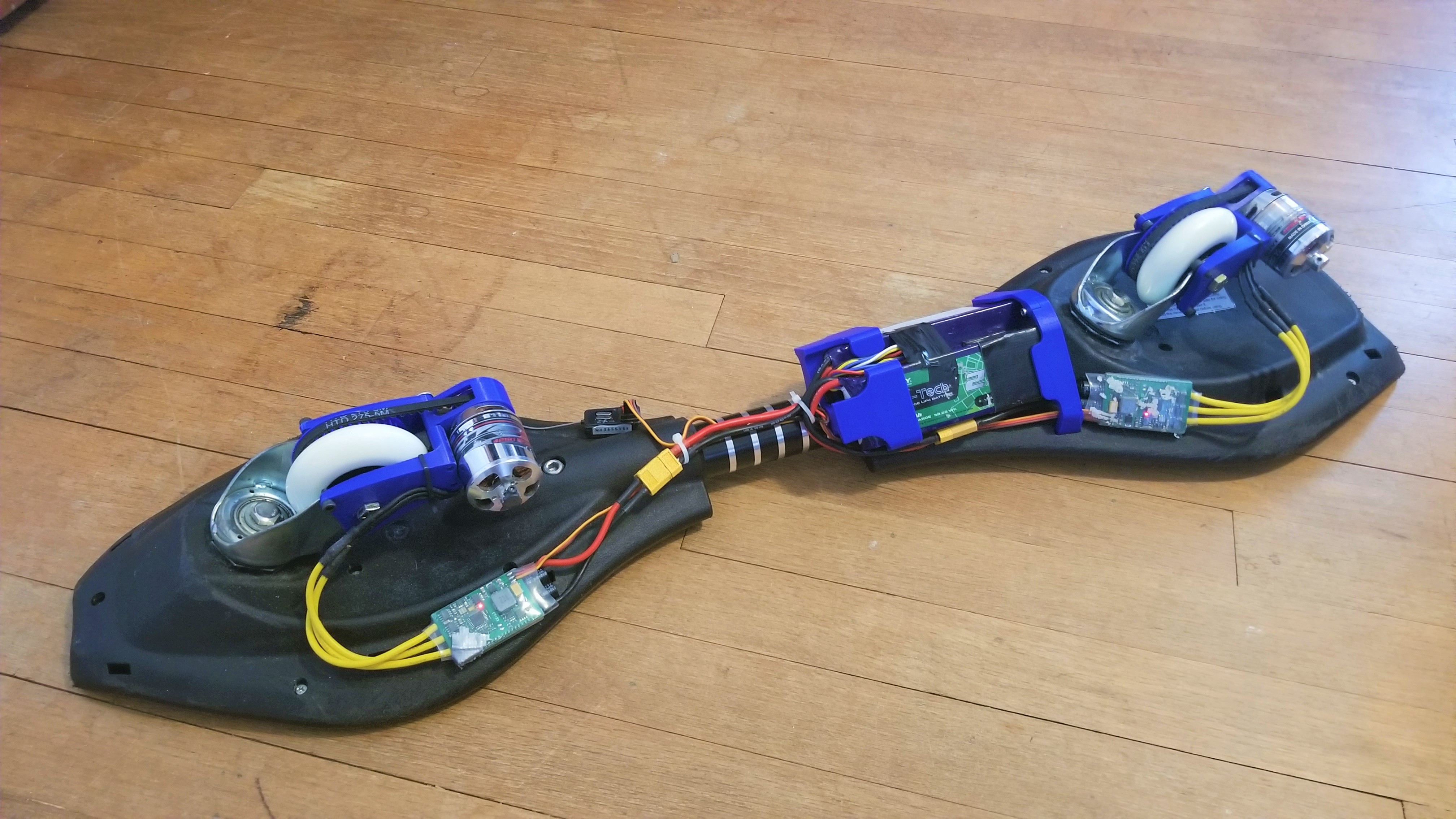
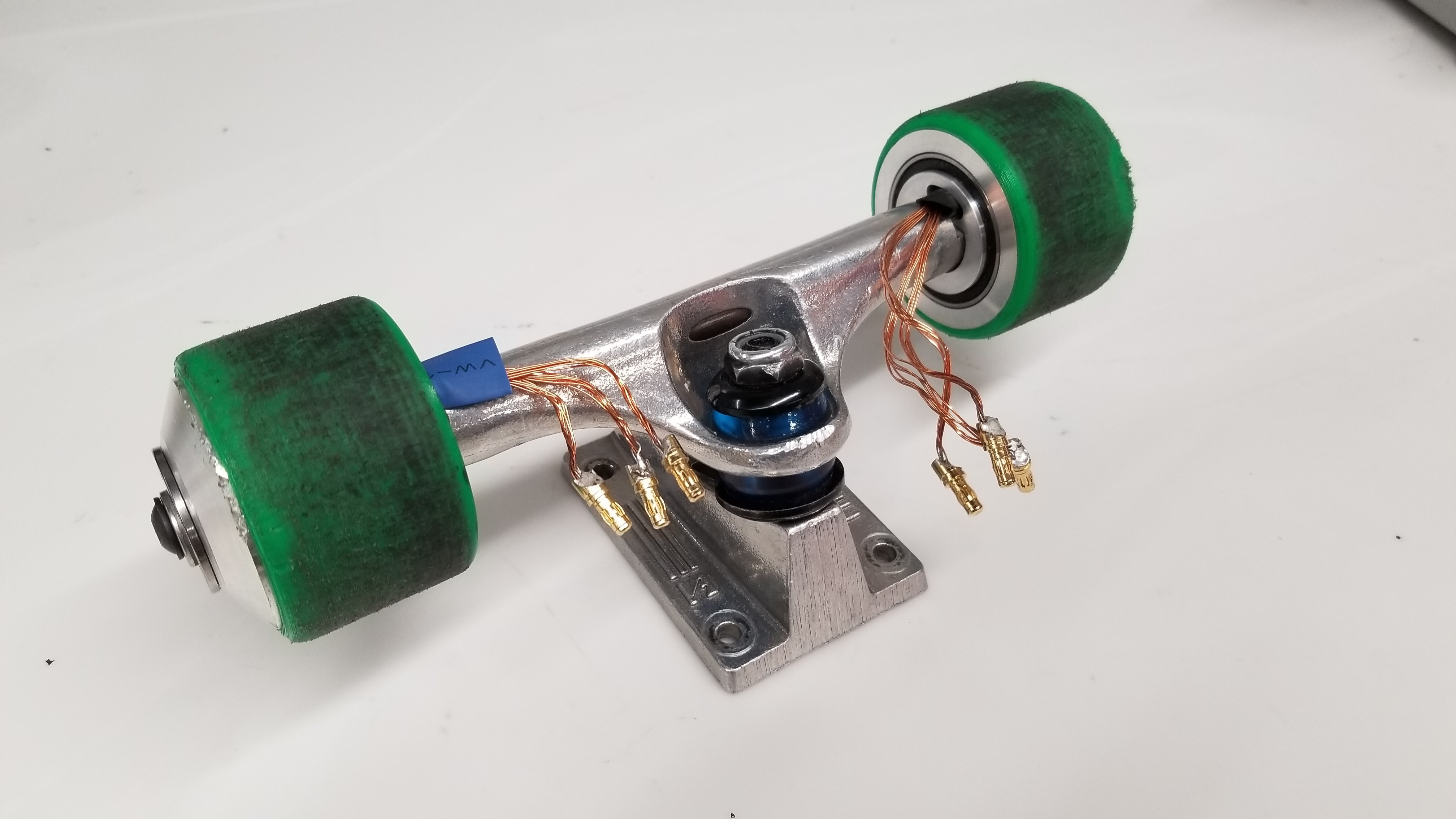
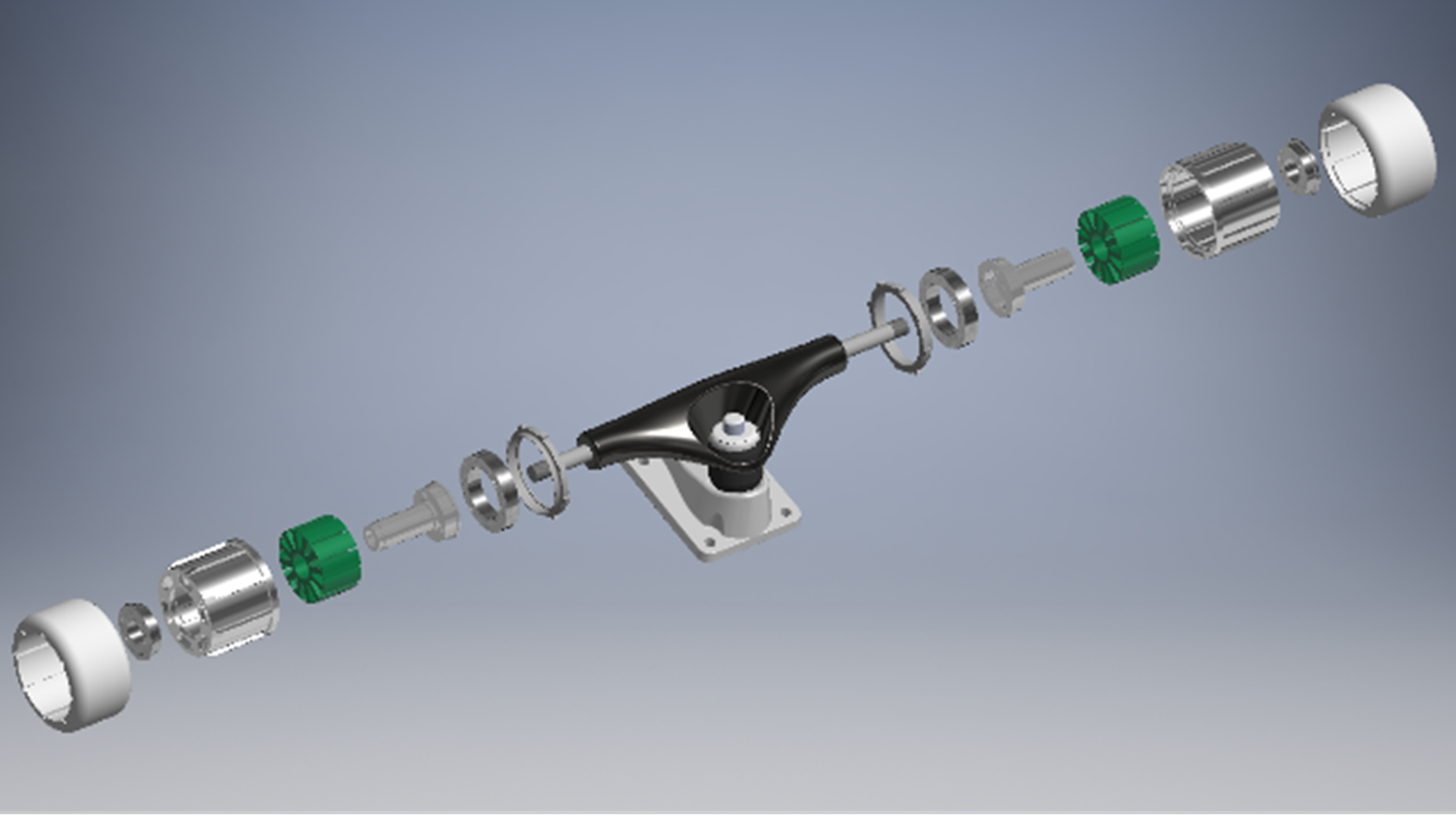
I love skateboarding and snowboarding, but ripstiking is a magical combination of both. What makes ripstiks so cool is they are self-propelling, meaning you don't have to push them like a normal skateboard to get going. In fact, you can go uphill on a ripstik without ever touching the ground with your feet, which is awesome, but not at all fun. The best part about ripstiking is riding downhill, because you can carve and drift exactly like you're snowboarding, but you don't need any snow! The sad part is once you're at the bottom of the hill, getting to the top again is a struggle. That's why I invented this homemade electric ripstik!
The tricky part about this design is that because both wheels are mounted on swiveling casters, any drivetrain would also have to swivel, and given the confined space and low ground clearance, that was not easy. I designed a compact drivetrain package consisting of a brushless outrunner, two pulleys, a belt, and 3D printed brackets. At first I only powered the rear wheel, then I thought, why not both!! The final version has identical ~1000W drivetrains on the front and the back, powered by two 4s Lipo batteries and hobby ESCs. The ESCs are controlled by a typical R/C receiver and transmitter combo, so I can hold a small wireless remote in my hand while riding. As with many of my projects, the 3D printed drive pulleys mounted to the motor wouldn't hold up for long, so I eventually CNCed them out of aluminum. I optimized the gear ratio to get serious torque with a decent top speed of about 17mph. It is unbelievably fun to ride!
Electric Bike
Project Date:
2014
Age:
17
Project Type:
Electric-Vehicles
Before electric bike kits were cheapily and readily available, I decided I wanted to build one as cheaply as possible. My neighbor had just donated to me his non-working fully electric lawnmower, so I scrapped the rest of lawnmower except the batteries, motor, and wiring to build this electric bike. I decided to keep it simple with a friction drive, especially since the lawnmower circuitry was basically full power or no power, so a friction drive served as a psuedo-clutch. I used metal flat bar from Home Depot to rig the motor to hover over the rear tire, and built a cage to hold the two large 12V SLA batteries on either side of the frame between my legs. Finally, I wired the front brake lever to to the lawnmower lever switch. In the end I could get going about 18mph! While it didn't have much torque, the original pedals and gears were all still intact so I didn't have to rely solely on the friction drive on hills. Once I got going it worked great to coast through my neighborhood!
Electric Scooter
Project Date:
2013
Age:
15
Project Type:
Electric-Vehicles
description not yet added
Rubik's Cube Solver
Project Date:
2019
Age:
22
Project Type:
Robotics , CADvsReal
While at Cornell, my Design with Embedded OS class involved a final project of our choosing as long as it involved a Raspberry Pi. My partner Ron and I decided to build a Robotic Rubik's Cube Solver.
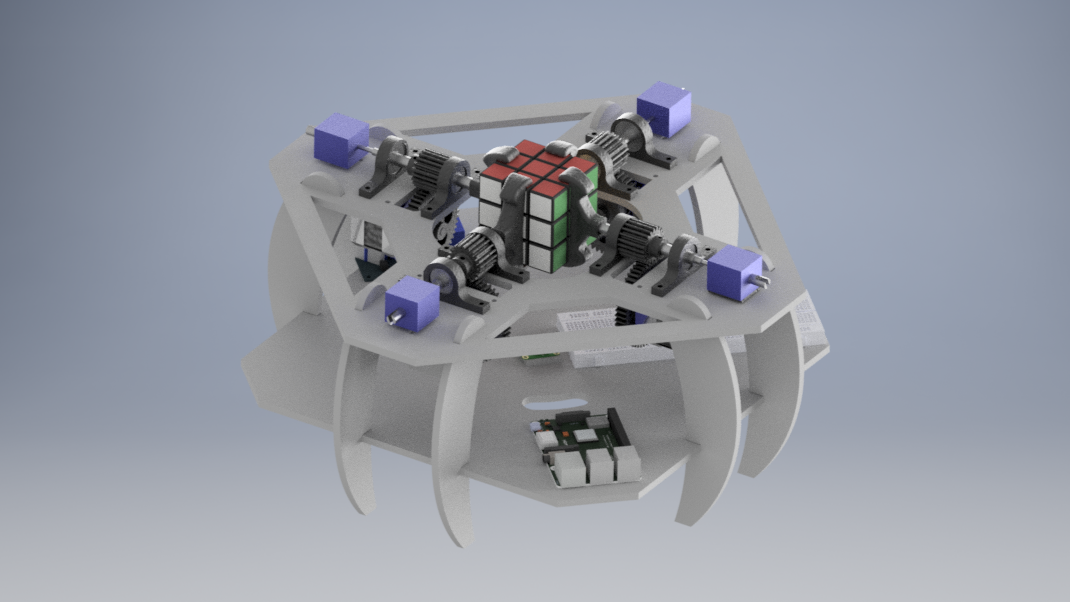
I knew this had been done before, so I started by researching existing designs. Fundamentally, you really only need two degrees of freedom to solve a Rubik's cube--one to rotate the entire cube, and one to rotate a face. As long as the two are cleverly designed (like using gravity to engage a just-rotated cube to the actuator that spins the face), just two actuators can be used to manipulate every face of the cube. The downsides to this are that because there is only one actuator to spin the face, every move first involves orienting the cube correctly, then spining it the clockwise or counterclockwise. This adds lots of steps and makes the total time to solve the cube longer. The other aspect to this operation is grabbing and letting go of the cube's faces. Most designs involve some time of gripper that can engage and disengage with a section of the cube between each successive move. On the other extreme, since a cube has 6 sides, if there were 6 degrees of freedom, you would never need re-orient the cube, resulting in much faster solver times. 6-sided solver designs cannot have grippers that wrap around the edges of the cube, otherwise they would collide with the other faces when rotating. 6-sided solver designs often involve a keyed shaft that mates directly with the modified cube face, so there is no need to grab around the entire section of the cube, rotate it, and let it go, like we do when solving the cube with our hands. While not having to disengage or engage with the cube between moves makes for a faster solve, it normally involves a customized cube to mate with the machine, as opposed to using any Rubik's cube, and it can be more complicated to get the cube in and out of the solver.
My design goals were to create a solver that could solve any unmodified 3x3 Rubik's Cube in less than 2 minutes. I choose to reduce re-oreintation moves by having 4 actuators--for the front, back, left and right sides. The reason I didn't choose 5 is because it was more convenient to mount the camera beneath the cube, and have the cube placed into the machine from the top. The build consisted of a frame that I designed and laser-cut out of white acrylic. The Raspberry Pi was equipped with a camera to take an image of each side of the Rubik's Cube at the beginning of the solve. The captured configuration of the cube was stored in a matrix and passed to an existing cube solving algorithm. The solving algorithm would return the series of moves necessary to fully solve the cube. The mechanical arms would then execute the prescribed sequence in order to solve the cube.
The most challenging part about this build was not the software, but actually the mechanical hardware. Each arm had two degrees of freedom, one for rotation, and one for translation to engage or disengage with its respective cube side. Each claw was being rotated by a stepper motor, becuase they are precise, repeatable, and relatively quick. Because stepper motors are somewhat large and heavy, I did not want to have to translate each stepper motor with the claw. Instead I choose to have a linkage between with the stepper shaft and the claw that allowed for rotation and translation. I chose an electromagnetic solenoid as the actuator for the translation because it was simple, compact, quick to actuate, and easy to drive. My first attempt at achieveing translation and rotation without translating the steppers motor involved a sliding set of spur gears. The stepper motor drove a wide faced spur gear, and the claw was rigidly connected to an axle with a smaller spur gear that could slide back and forth along the larger spur gear beneath it as the solenoid was actuated. The problem with this approach was the backlash. With each consecutive 90-turn (in opposing directions) the error would accumulate due to the backlash in the spur gears. Because my system was not closed loop, meaning I did not actually know the true position of the claw, only the stepper motor's commanded shaft position, I could not correct this error easily and after enough turns the cube face would not be flush with the rest of the cube, preventing any other side from turning. My second attempt at this mechanical problem involved a custom designed coupler that would allow me to get rid of all gears, and hopefully all the backlash too. This coupler consisted of a hexagon that could slide in an out of a larger hexagon, but it was tightly-toleranced so if one hexagon rotated, the other would rotate in perfect sync. I 3D printed these hexagons, and then sanded them down to achieve a smooth finish that would slide with very little slop. This was not easy to do given imperfections in the 3D printing and my sanding. After many attempts, there was still a small amount of backlash that would cause issues after so many turns were executed. This way I could achieve higher tolerances and hopefully eliminate the backlash. I should mention if I had installed an optical encoder on the shaft that was directly mounted to the claw, I could implement closed loop-control and achieve perfect 90-deg turns event if my linkage had backlash or slop. I wanted to keep is simple, not having to buy more expensive sensors, integrate more hardware, and write more software, so I choose to go for mechanical perfection... After a while, I built my Desktop CNC, which enabled me to CNC these couplers out of nylon instead of 3D printing. This got me closer to 0 backlash, but now I was having issued with inner hexagons not sliding very well. The tradeoff was between easy sliding and little backlash. In the end this system worked, but it was not 100% reliable. Please see our project website for the class.
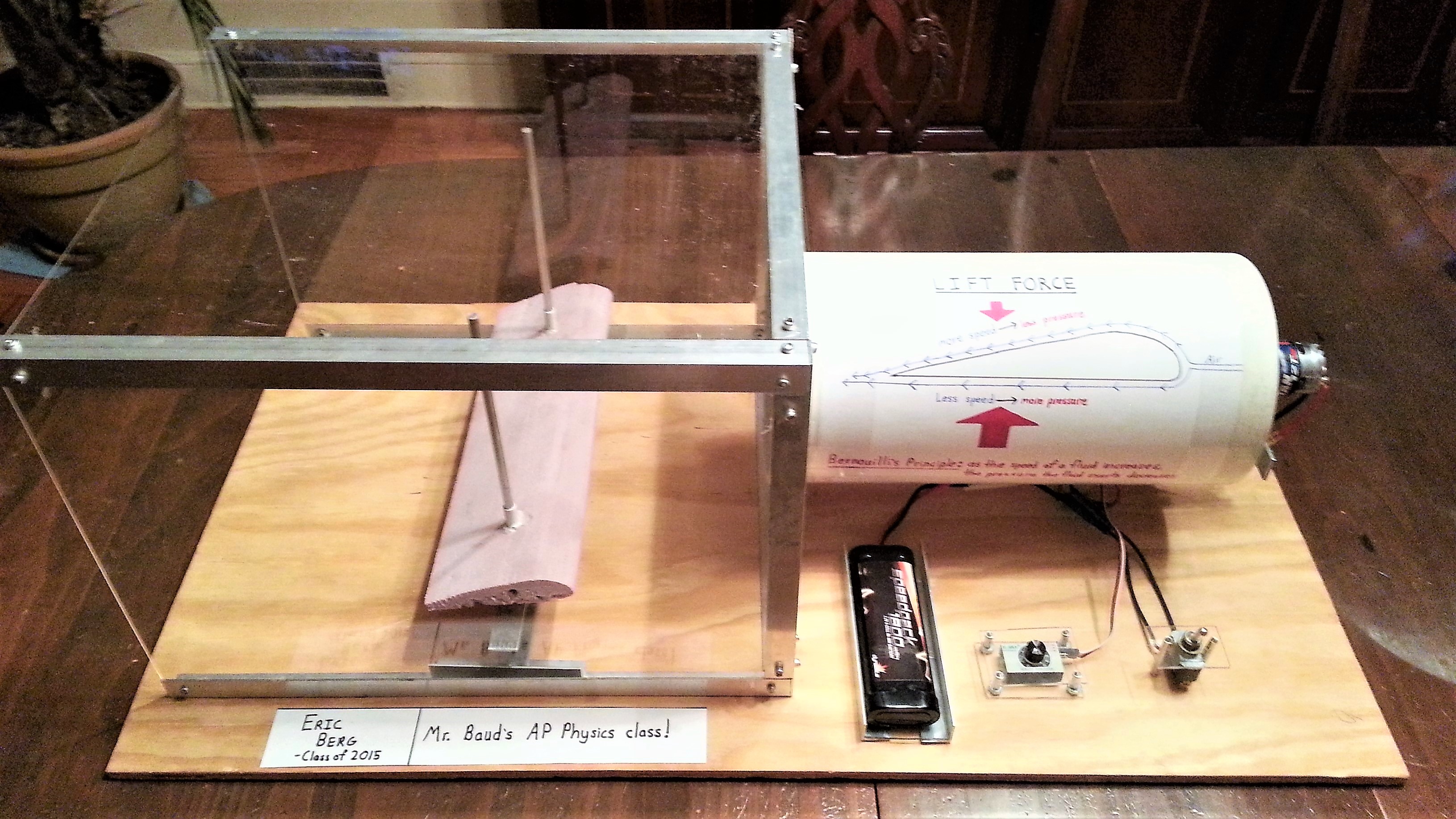
This is a homemade model wind tunnel that I made for my AP physics class in high school. The model shows the effects of lift force on different foam airfoils.
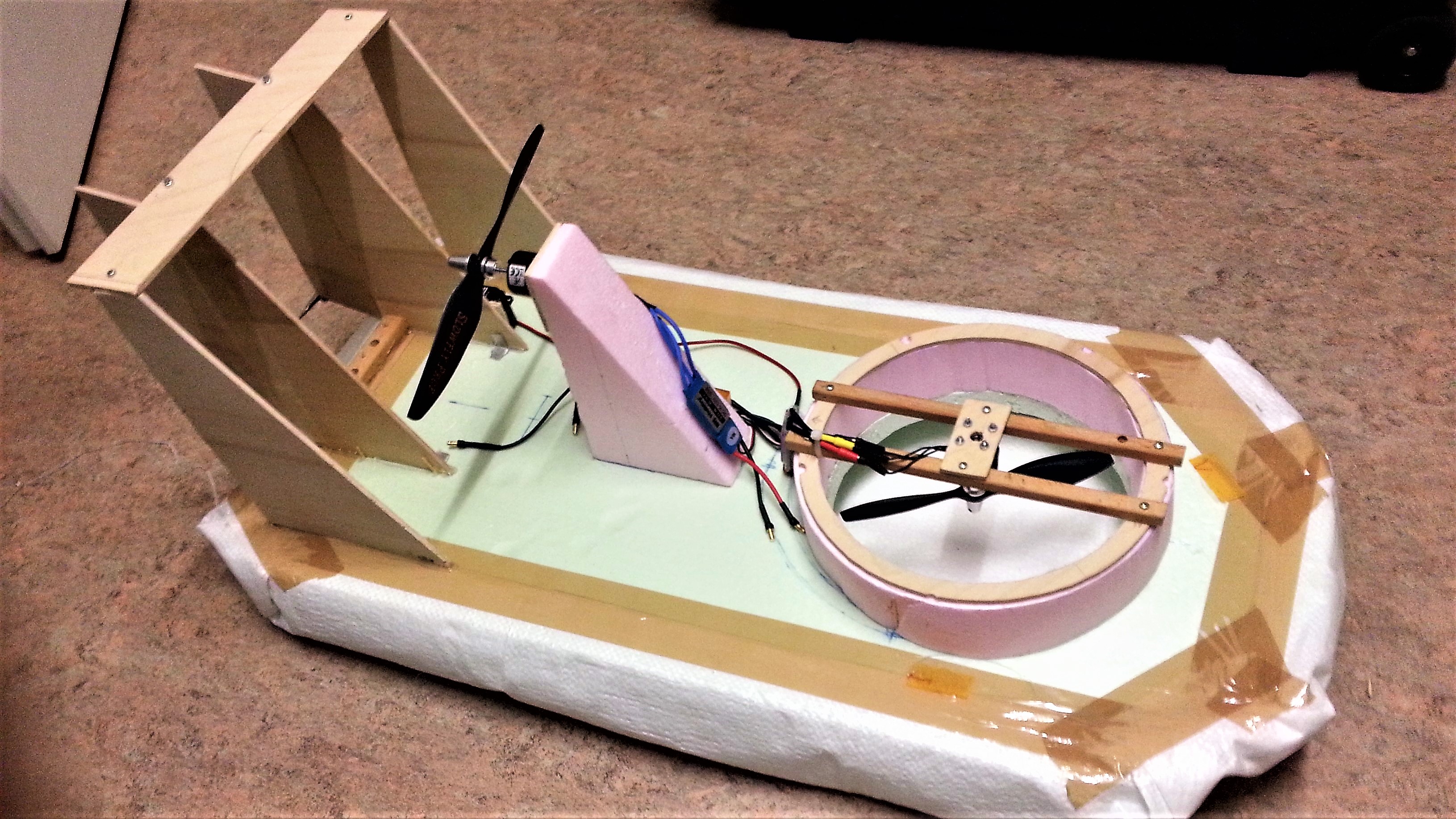
Hovercraft
Project Date:
2013
Age:
16
Project Type:
Mechatronics
This is a homemade RC hovercraft that I built with my cousin in about 4 days out of scrap materials and leftowver electronics from other R/C builds.
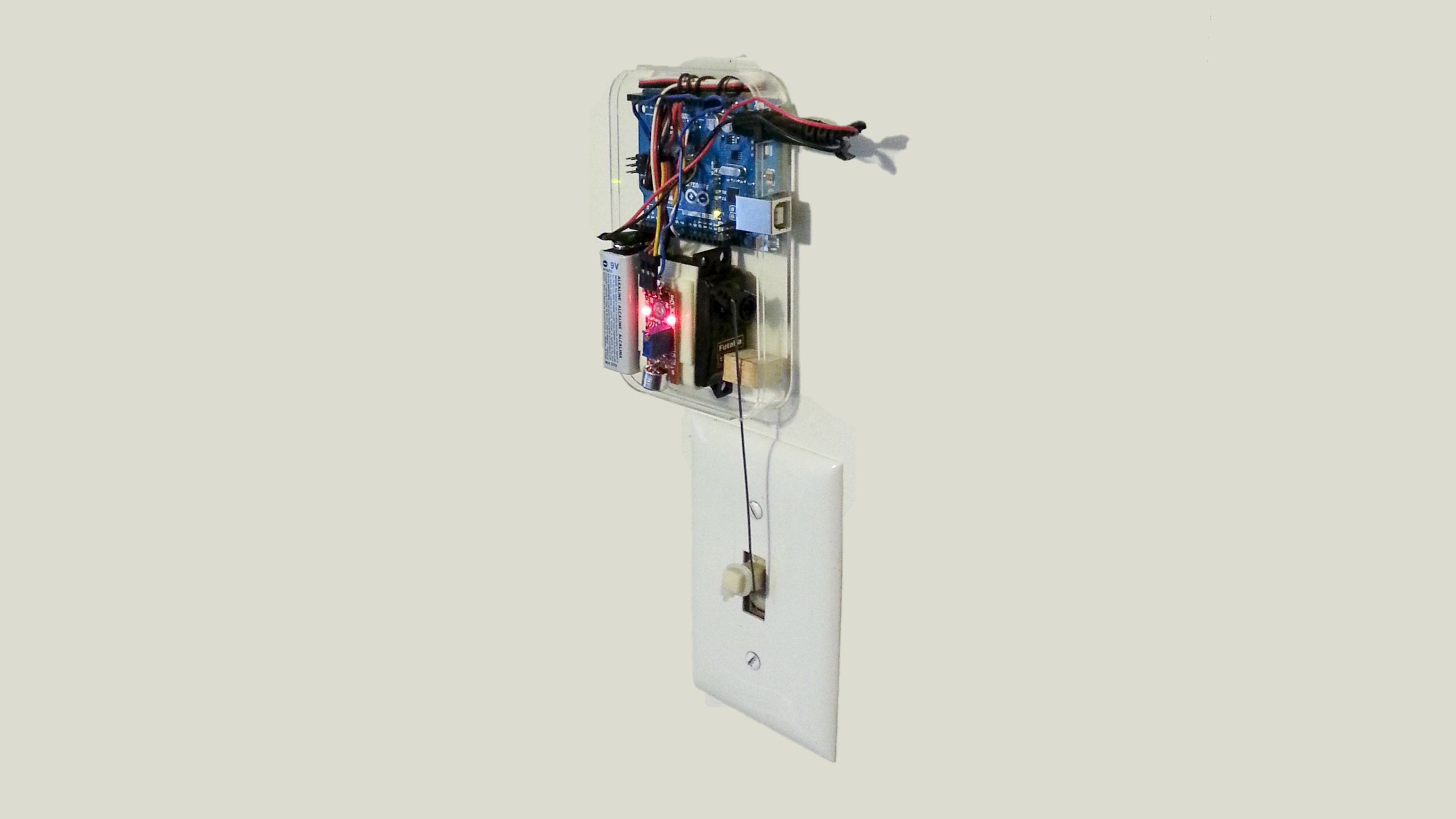
Clap-Clap Light
Project Date:
2014
Age:
17
Project Type:
Robotics
This was one of my first Arduino projects. It is a clapper light that I put in my room growing up. It will only flip the light switch if it recognizes two claps. I built it using an Arduino, a servo, a 9 volt, and a sound sensor/microphone.
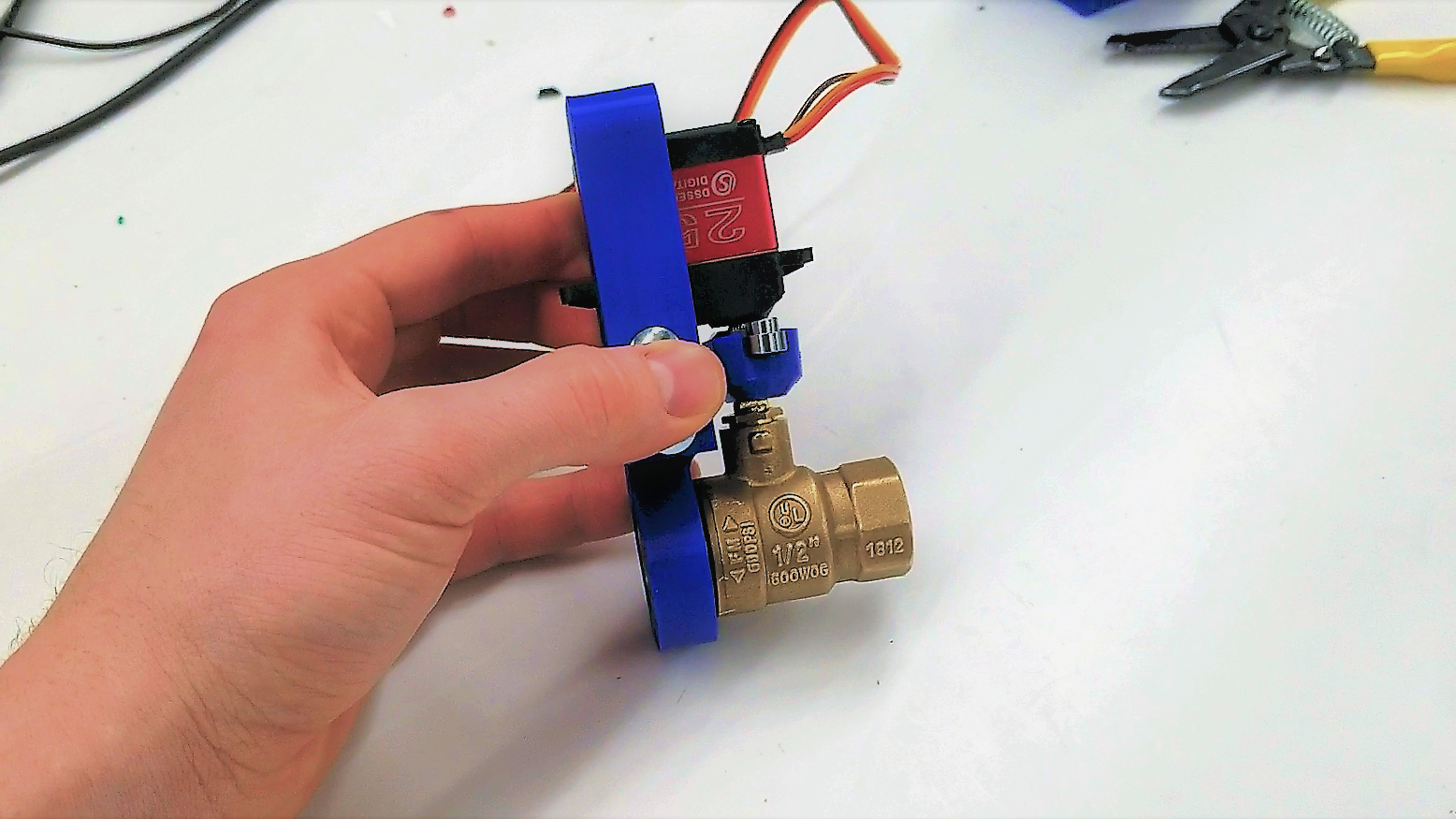
Servo Valve
Project Date:
2019
Age:
22
Project Type:
Mechatronics
I built a servo valve (AKA proportional solenoid valve) using a simple ball valve and a high torque RC servo. Total cost ~$35. This valve can control the flow rate of liquid through it via an Arduino or any other microcontroller.
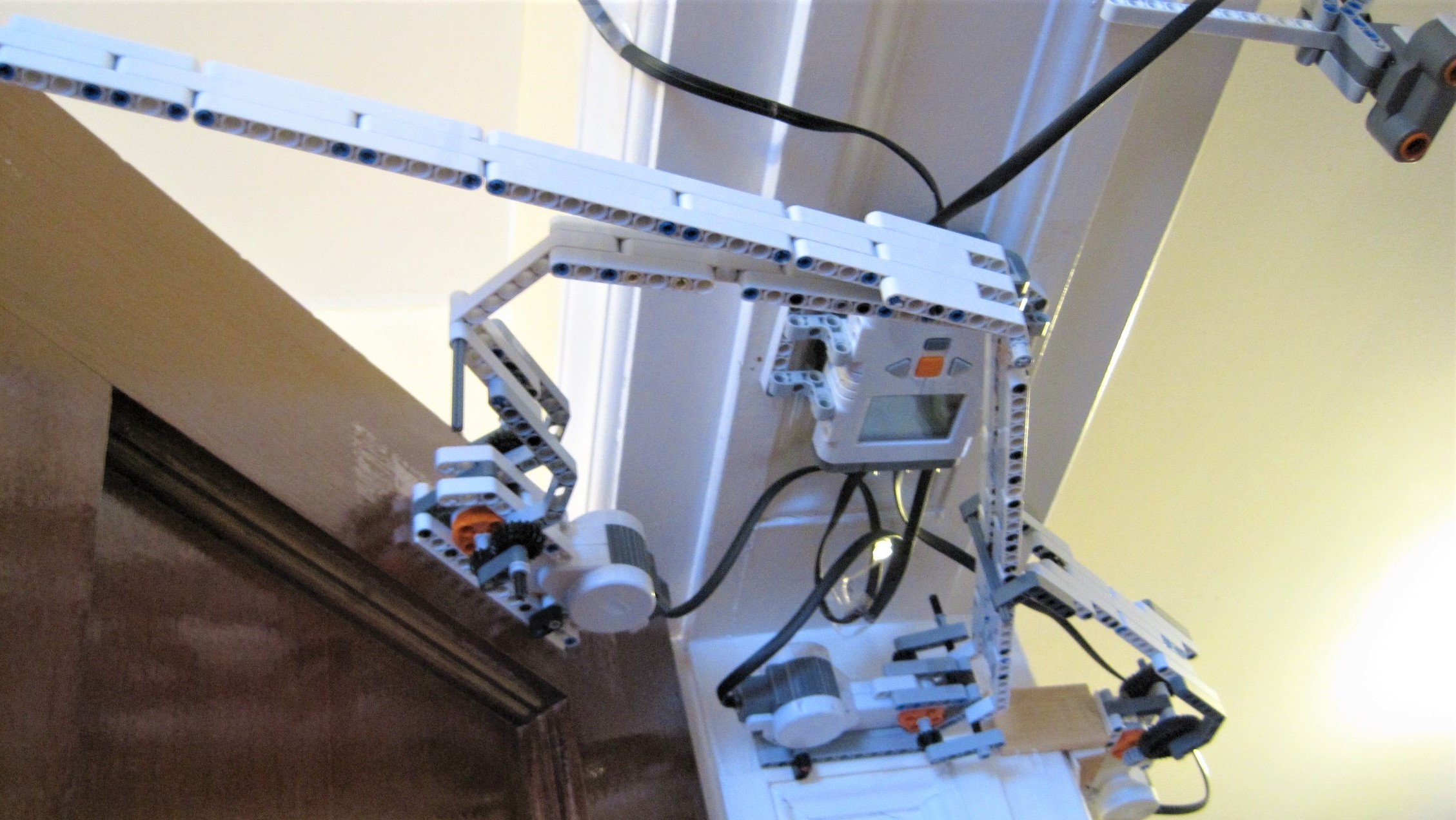
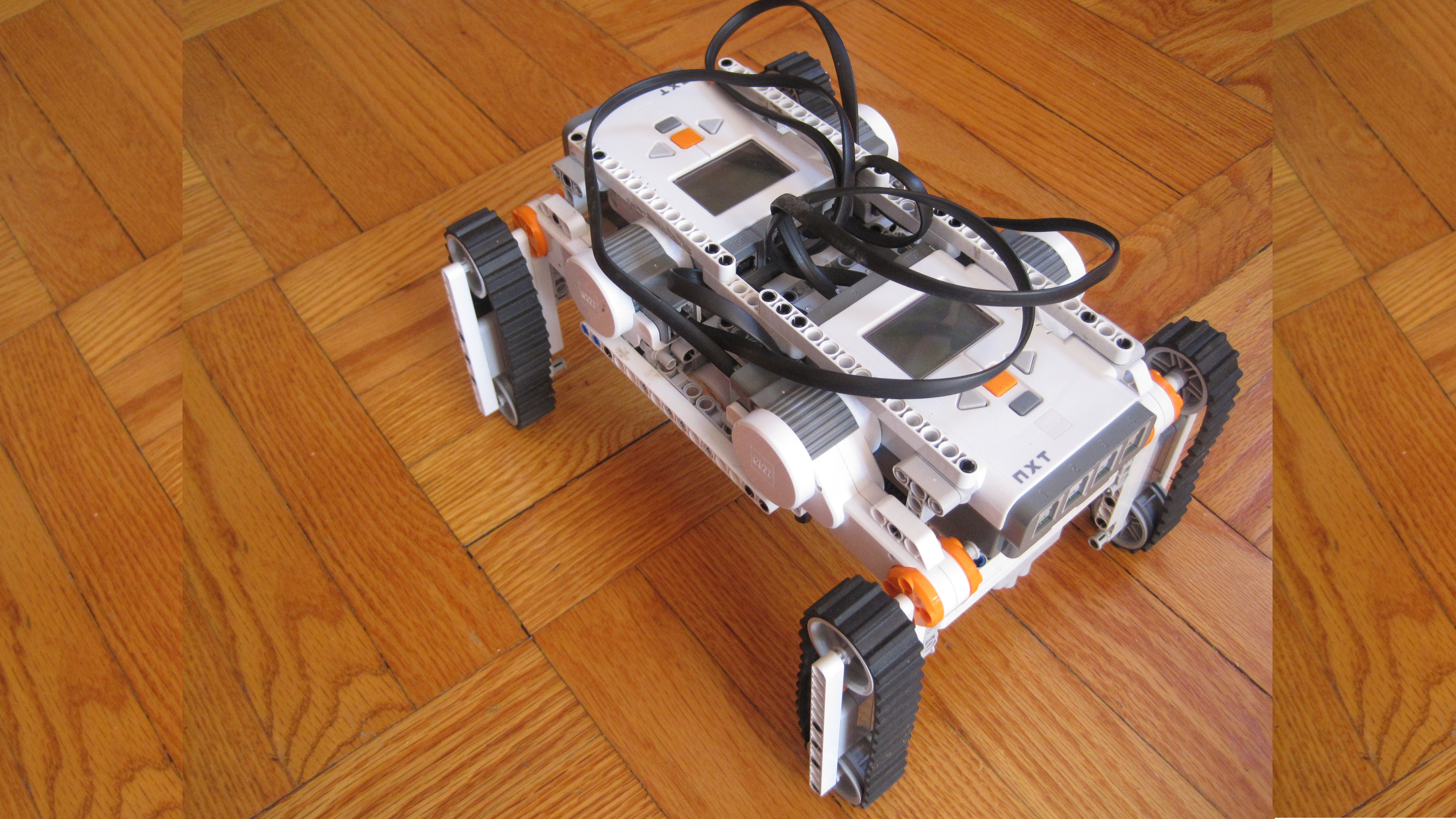
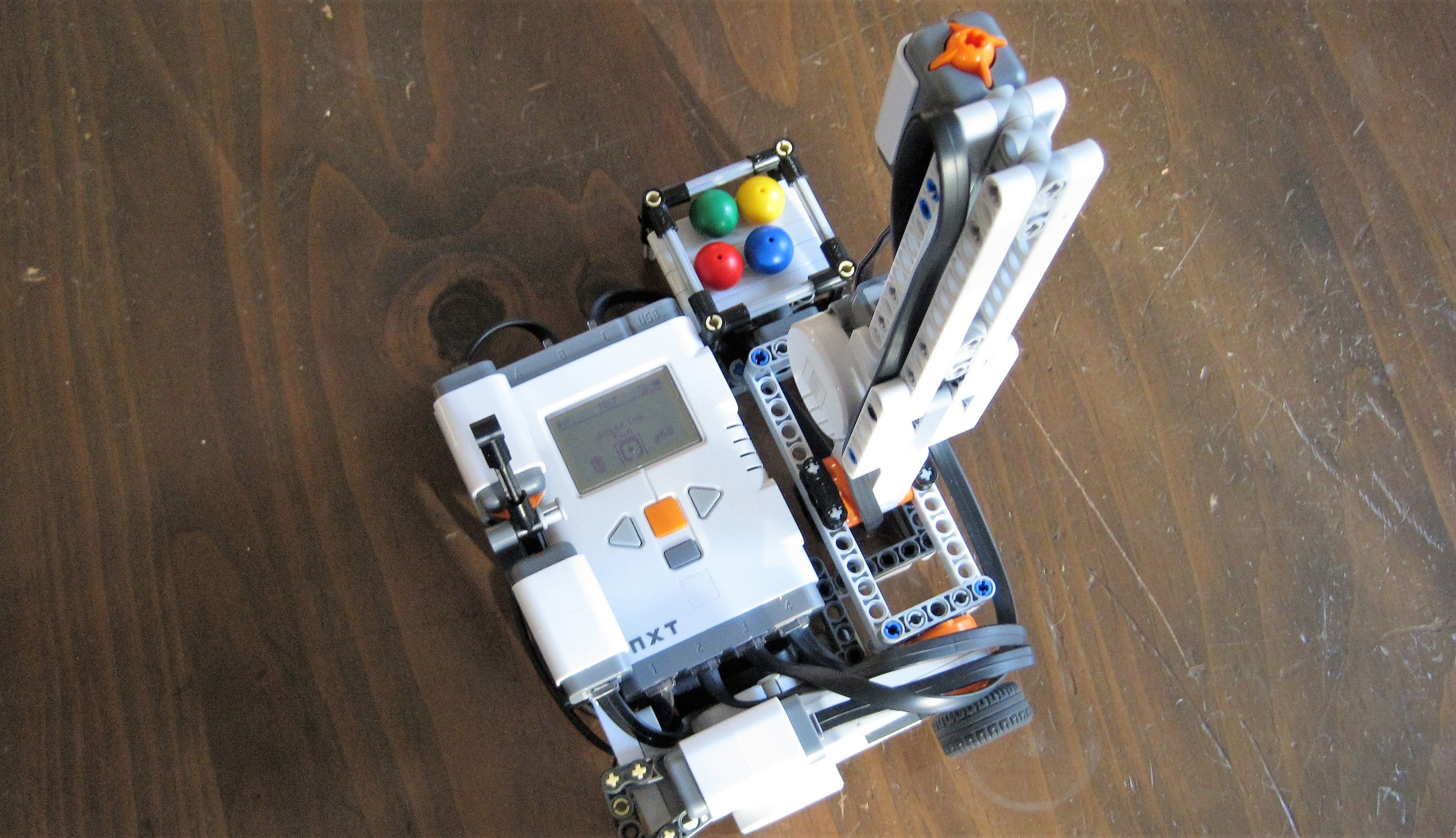
Automatic Door Opener
Project Date:
2011
Age:
14
Project Type:
Robotics
This contraption uses an ultrasonic sensor to detect someone entering the room and automatically opens the door. I built this using a Lego Mindstorms NXT Robotics kit.
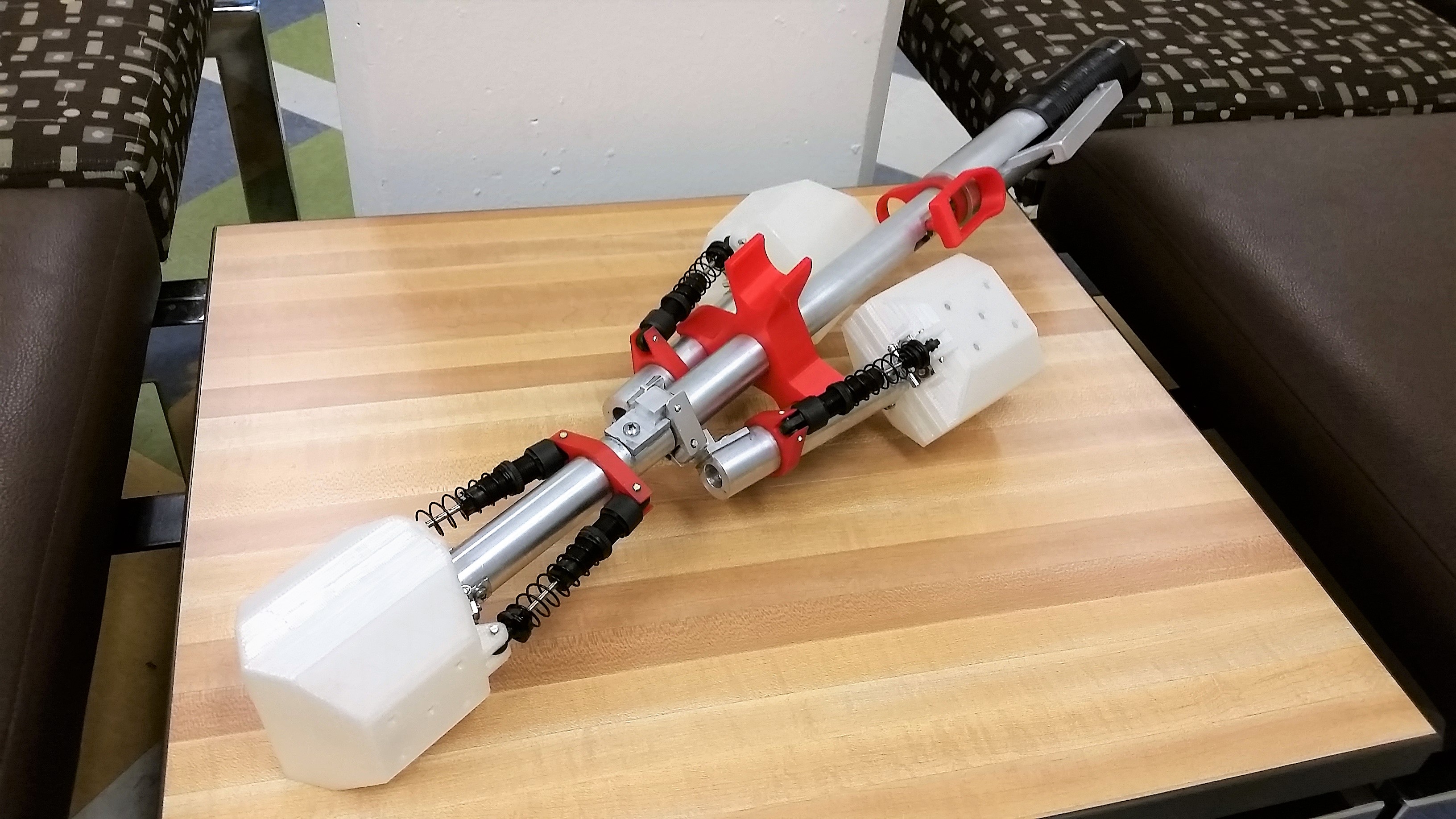
NASA Sampling Tool
Project Date:
2016
Age:
19
Project Type:
Random, CADvsReal
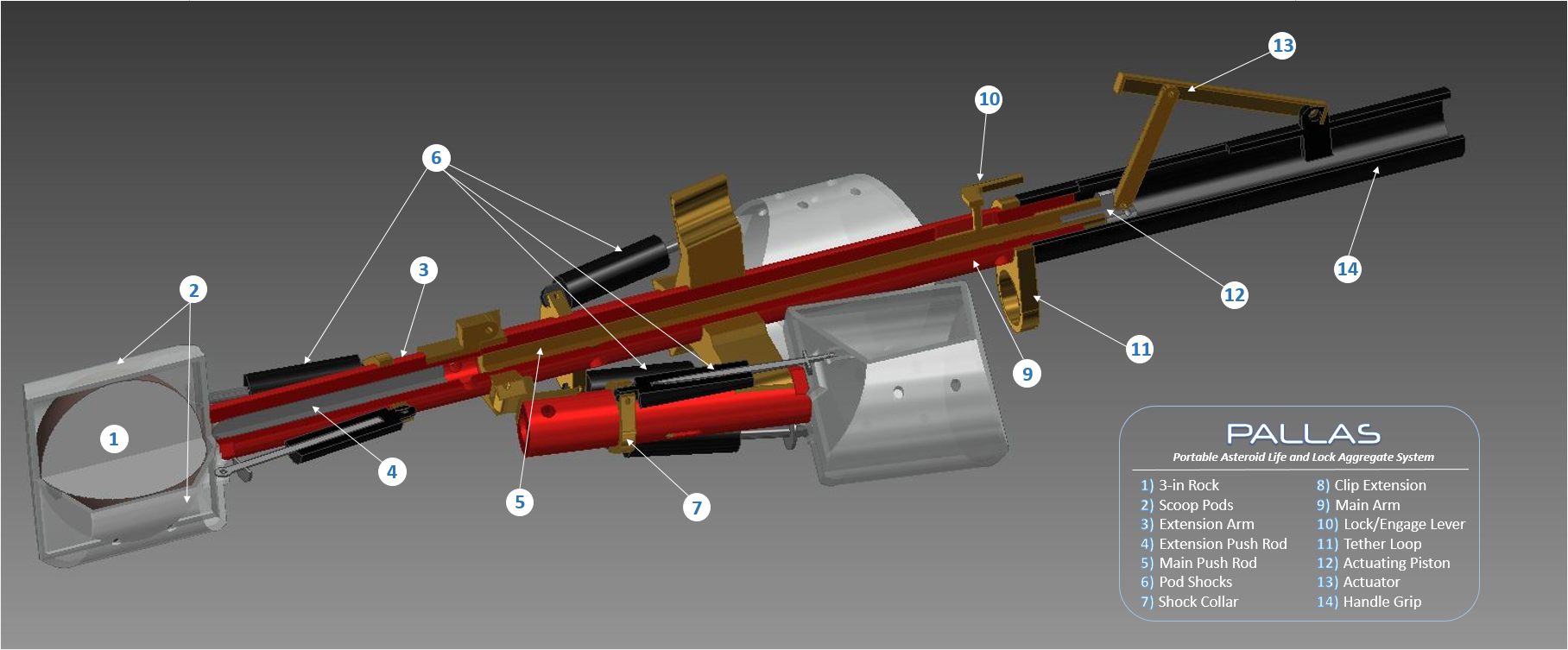
Please see the paper published in the AIAA about our device called PALLAS (Portable Asteroid Lift and Lock Aggregate System) designed for the 2017 NASA Micro-g NExT Competition.
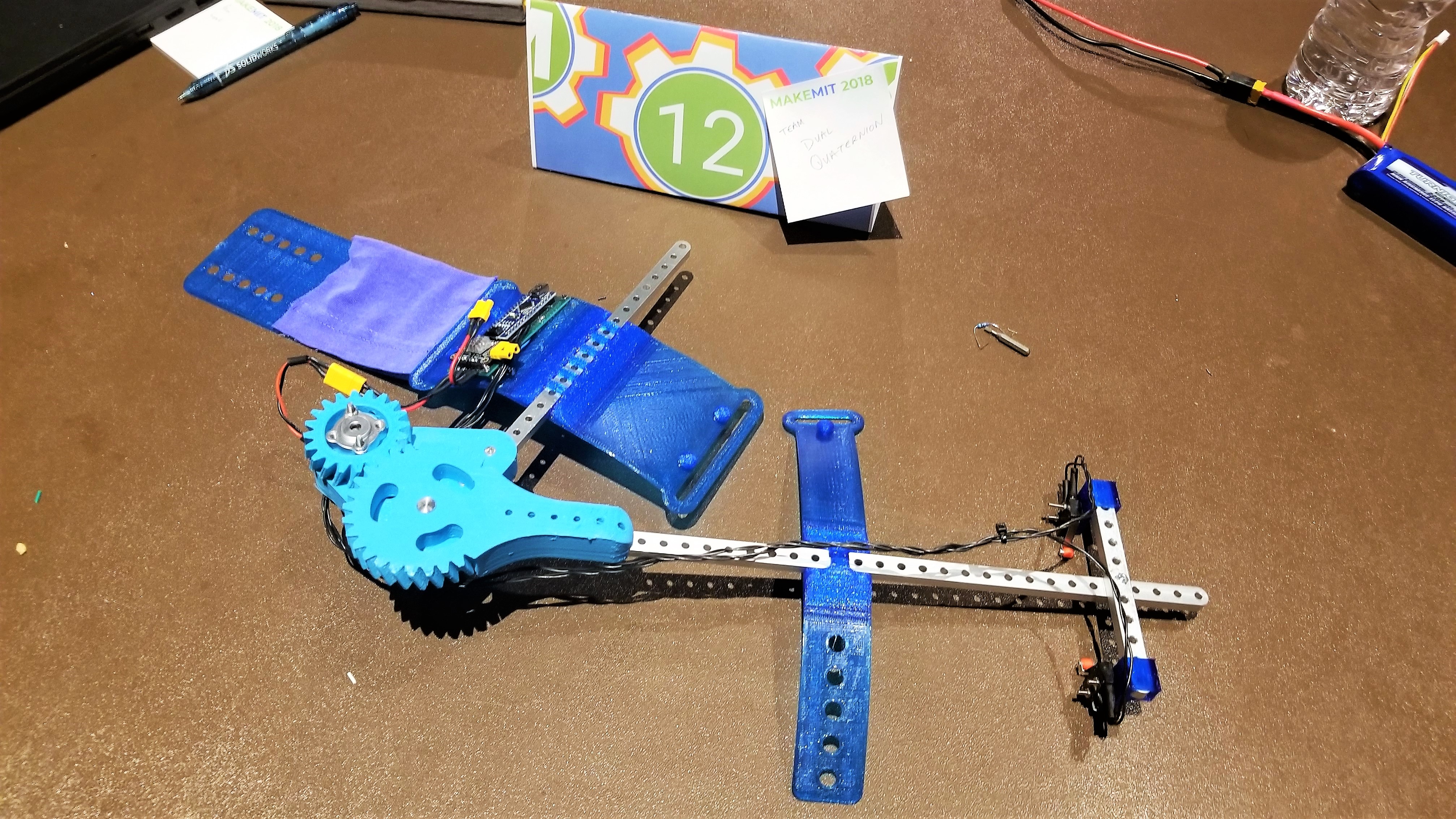
These wearable devices are designed to assist blind people in two ways, by speaking what the camera sees, and by providing haptic feedback to the person's finger when they are approaching something. We used Microsoft's Computer Vision API to interpret what the camera was seeing and an Amazon Alexa to recite the image description out loud. This was our submission after 24hrs in MIT Makeathon 2017 with my friends Adam Weld and Padraig Lysandrou. We won the Amazon Sponsorship Prize for our prototype!
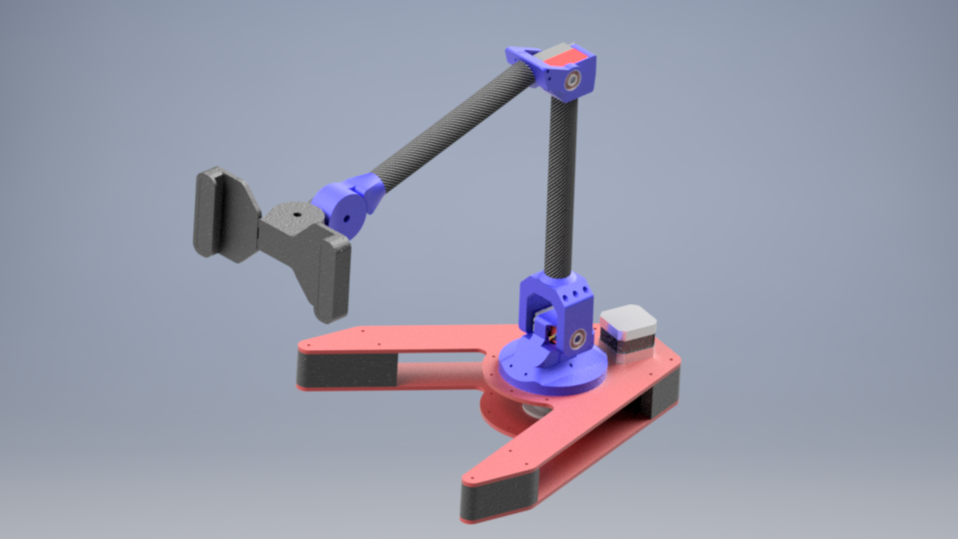
I built this to film dynamic shots of things I make for my Youtube channel. I used a lazy-susan, a micro-servo whicih I converted to be continuous rotation, a servo tester to control the speed, and a small lipo battery. This design is super low profile, compact, elegant, torquey, and totally portable!
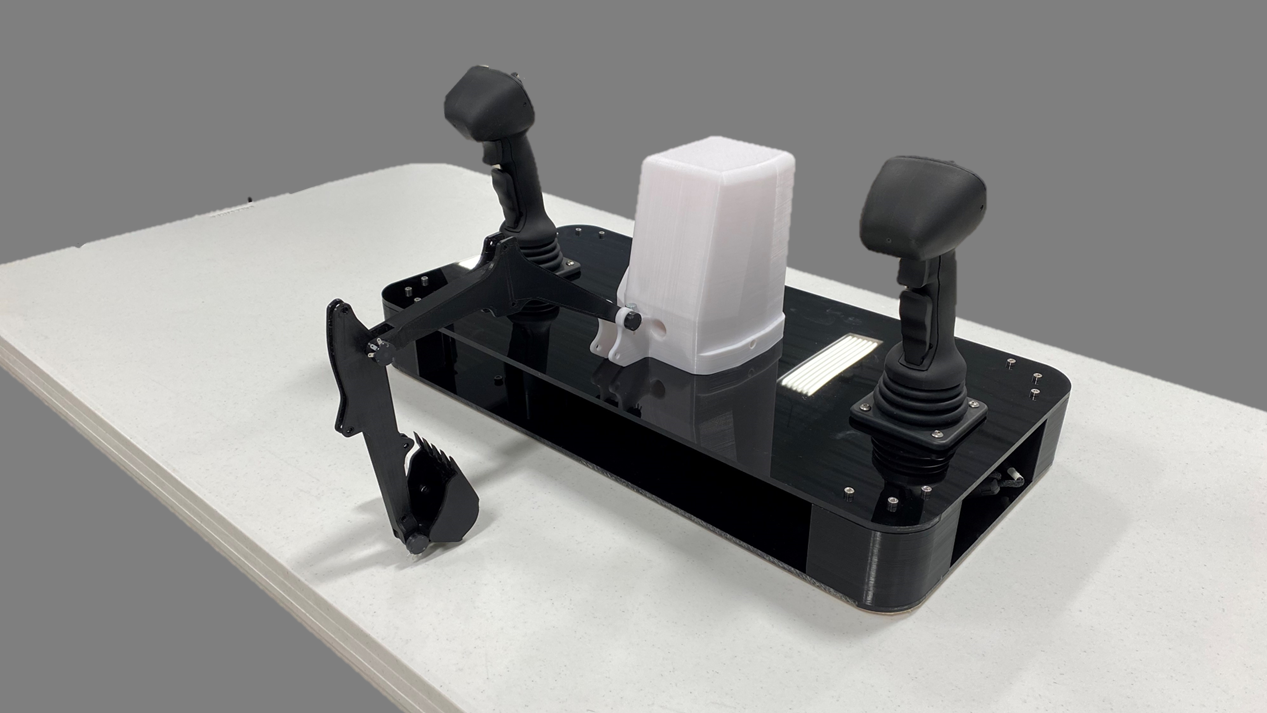
Actuated Joysticks
Project Date:
2021
Age:
23
Project Type:
Mechatronics
I actuated the joysticks of a 3-ton excavator with hobby-grade servos!
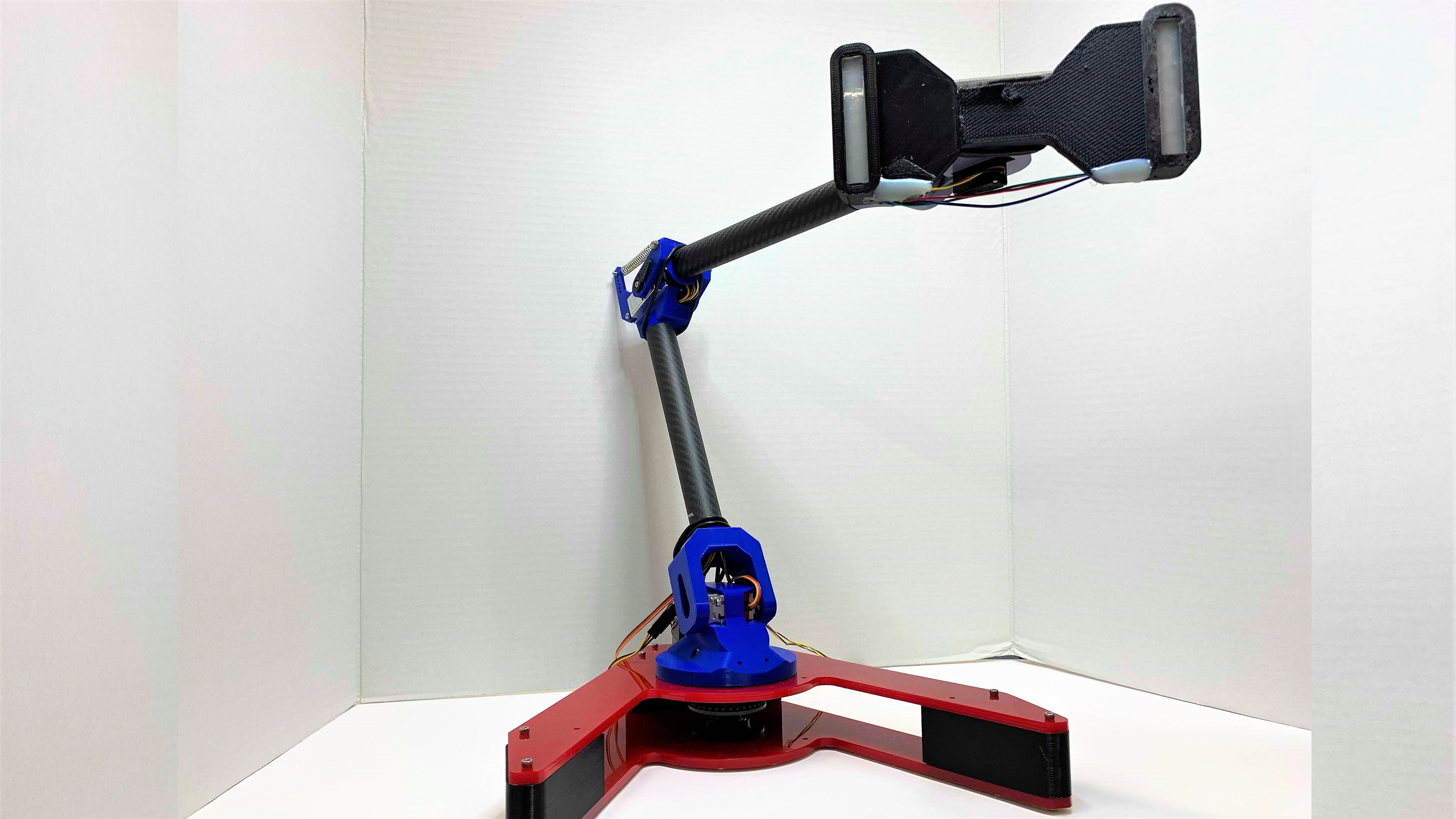
Delta Robot Platform
Project Date:
2017
Age:
19
Project Type:
Mechatronics , CADvsReal
This is a 3 DOF Delta robot motion table that two other friends and I built for a final project in my Cornell Electrical and Computer Engineering course called Microcontrollers. All project details including hardware description, hardware links, wiring diagrams, and source code can be found here. https://people.ece.cornell.edu/land/courses/ece4760/FinalProjects/f2017/psl58_aw698_eb645/psl58_aw698_eb645/index.html
Motorized Pencil Sharpener
Project Date:
2016
Age:
18
Project Type:
Random
I made this for fun as a gift for my dad's birthday. Yes... I realize it's totally impractical.
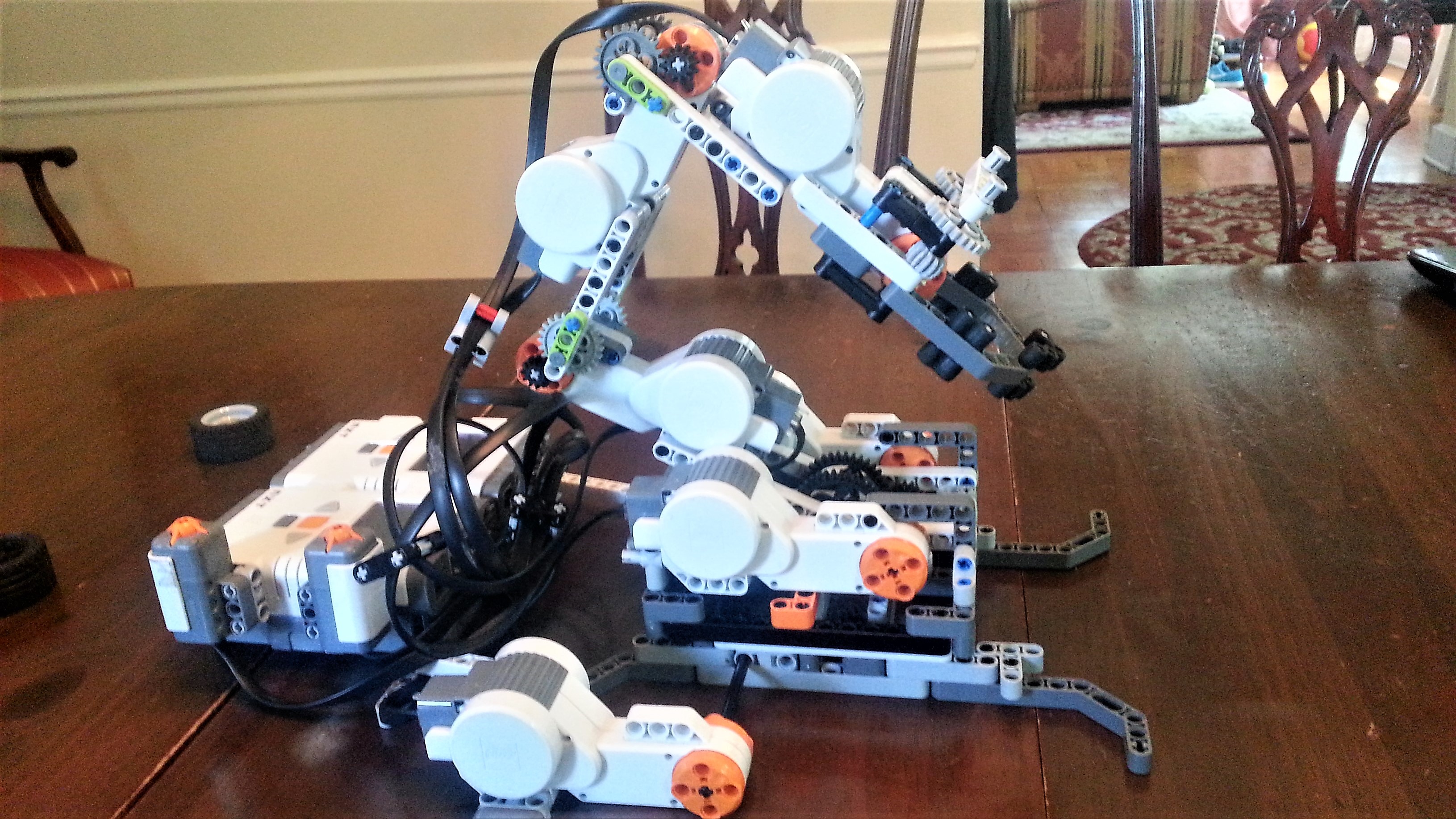
5 DOF Robotic Arm
Project Date:
2014
Age:
16
Project Type:
Mechatronics
One of my earliest experiments with robotics arms, this is a robotic arm that I made using two Lego NXT bricks and 6 servo motors. It is not super precise but it has lots of maneuverability with 5 degrees of freedom. It can be manually controlled by touch sensors and the NXT buttons. At this age, I did not yet know how to do inverse kinematics, so I didn't develop any form of end-effector control.
Vending Machine
Project Date:
2015
Age:
17
Project Type:
Robotics
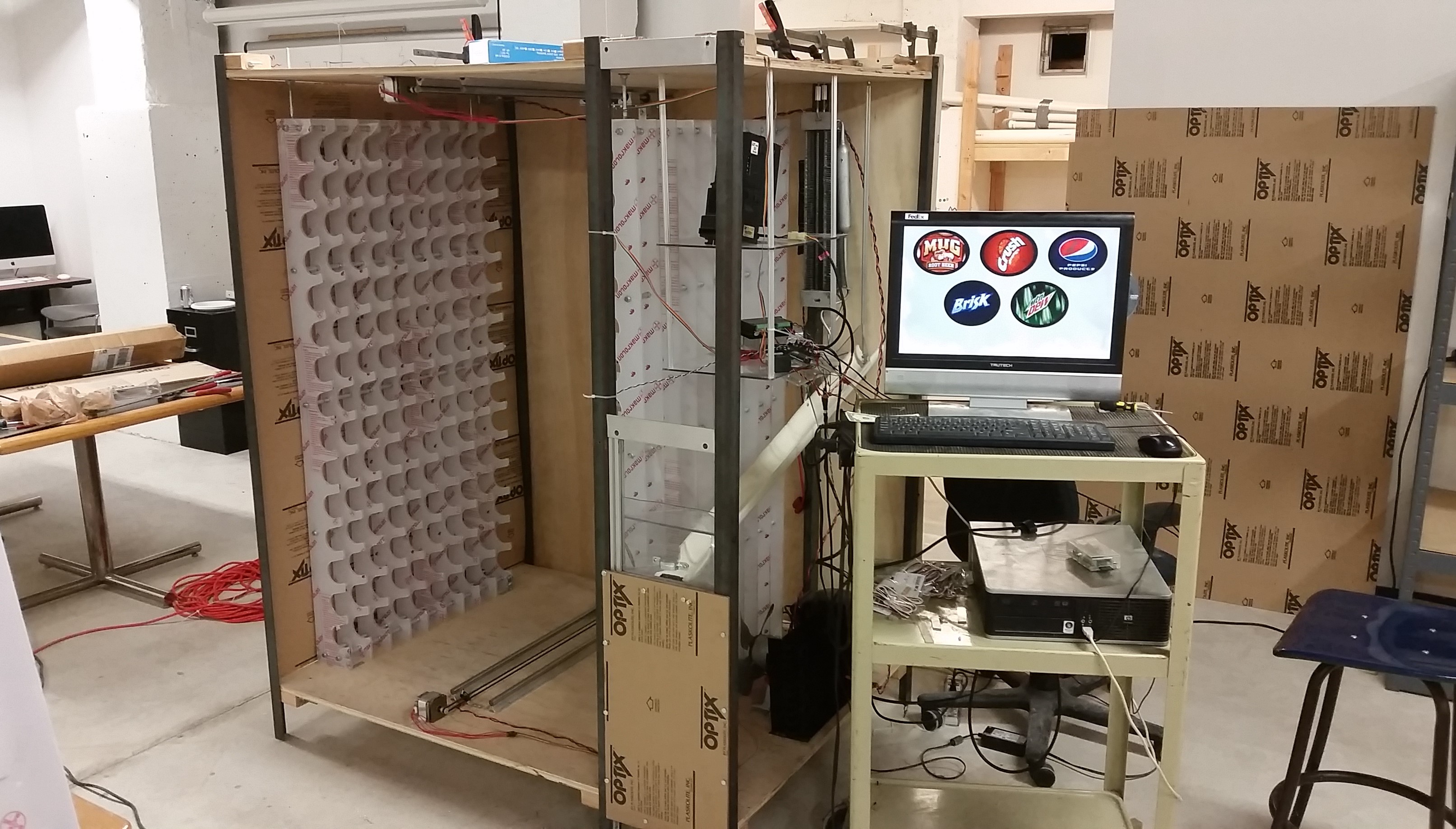
In high school, I founded our FIRST FRC Robotics team when I was a Junior. After competing in the FRC season, which is a short two months, the team, a big group of eager nerds, didn't have any projects until the next season. To fill our time, we decided we would take on an off-season project. I pitched to my school adminsitration the idea of keeping us busy with an extra project, and convinced them to fund our off-season budget. As team leader, I decided we would pick a project democratically, so after a few brainstorming sessions and a final vote, we landed on this- a robotic arm vending machine!
The project was quite ambitious, given it involved building an entire vending machine from scratch- frame, insulation, cooling, cash recevier, user interface, and on top of that a functioning robotic arm that could grab and dispense soda cans. It was truly a system of systems project. We set off, tackling one challenge at a time, building and testing subsystems independently first before integrating them together. We developed a custom touchscreen user interface, we built a large 3DOF robotic arm, a motorized carriage for the arm to rest on, a working cash-accepting system, a cooling unit, a dispensing slide, and the full vending machine frame structure. After 2 years, we got about 80 percent through with the project, and morale started to wane. People lost motivation in such a long, hard project. Unfortunately when I graduated high school, the Robotics Team which continued to grow and succeed after I left, let this project die. Please check out the two videos below to see the progress we made.
Tank Robot
Project Date:
2013
Age:
15
Project Type:
Robotics
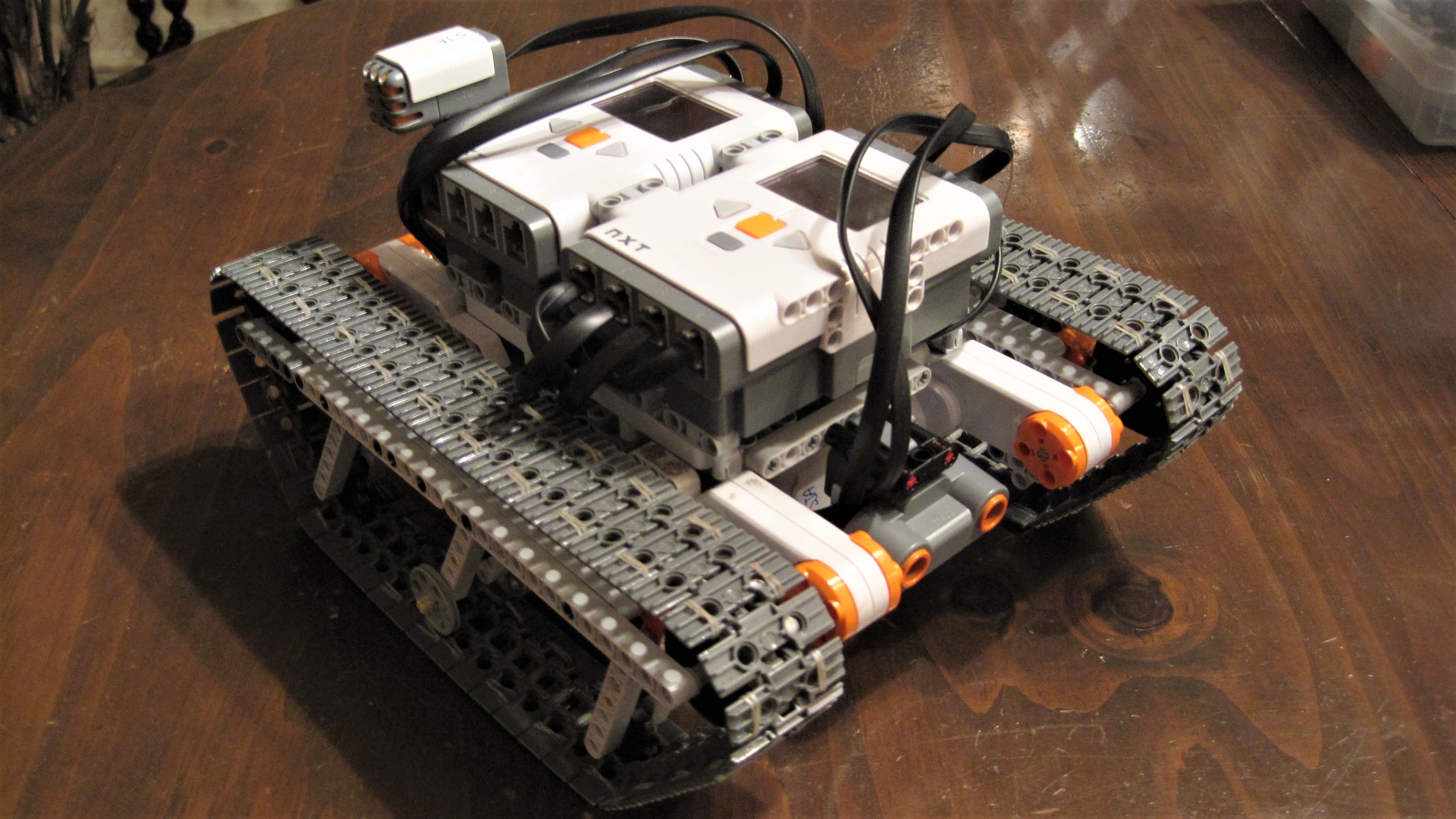
Lego tank I built for a high school science project.
Hubless RC Car
Project Date:
2013
Age:
15
Project Type:
Mechatronics
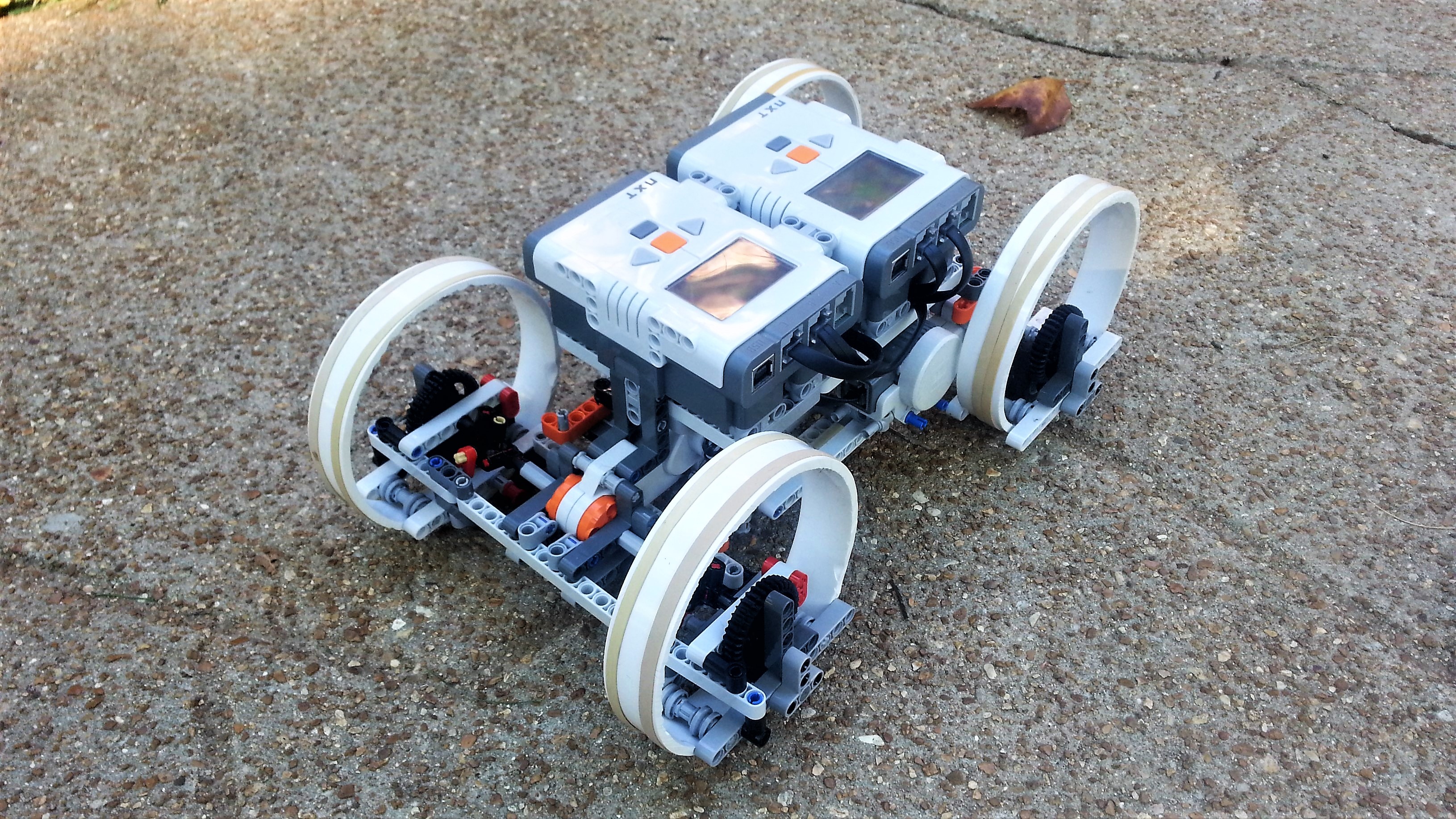
This is a 4-wheel drive hubless car I made using my Lego Mindstorms NXT 2.0 kit.
mPOD Scanning Device
Project Date:
2021
Age:
23
Project Type:
Electronics
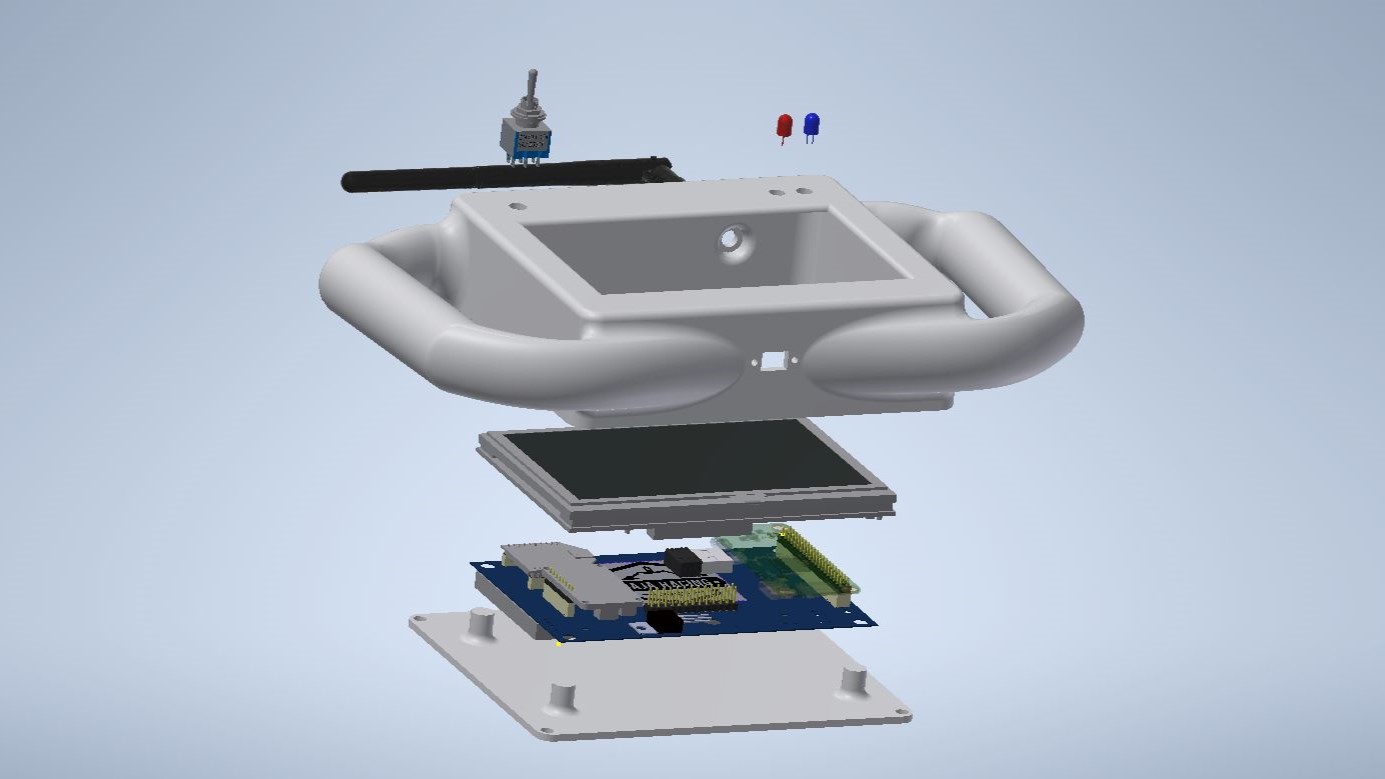
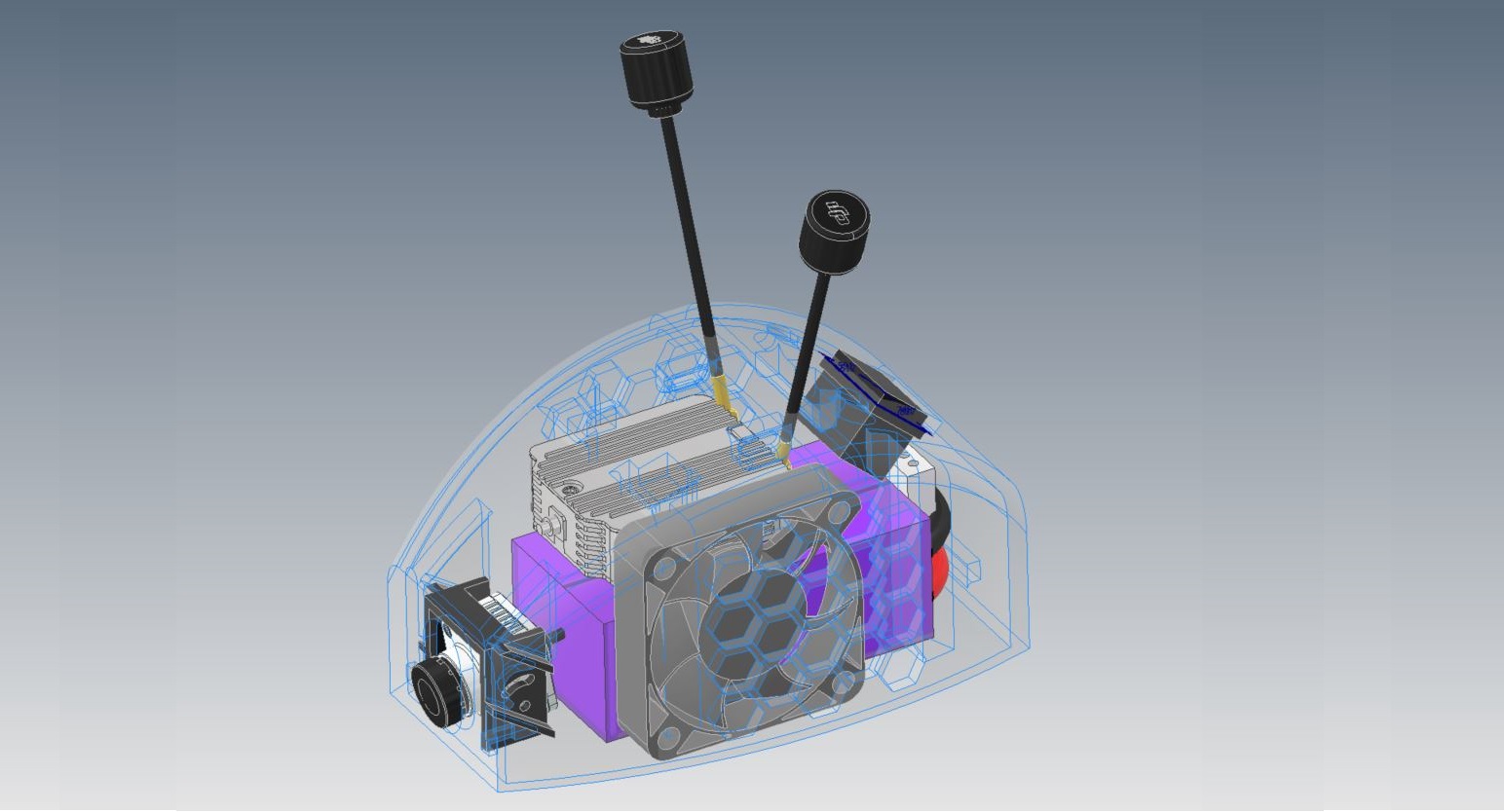
I was hired by small biotech startup to design and build first prototypes for their first product, a COVID rapid test scanner. This involved integrating an Arducam Pico4ML microcontroller, SD card reader, lipo battery shield, buttons, LEDs, and other electronics into a device that could capture an image of the rapid test, feed the image into a neural network to determine the test result, and then display the results to the user and log the results to an sd card. I designed the device’s graphical user interface (GUI) and wrote embedded C++ software to integrate all electronics. I also used designed the test unit casings over many iterations using CAD and 3D printing.
Magnetohydrodynamic Propulsion
Project Date:
2015
Age:
17
Project Type:
Random
When I first discovered this physcial phenoma, that you can move water with electricity and magnetism, I was enthralled. I was much less excited when I realized why this technology has not gained traction in the industry- it takes a lot of power to produce a little force, so scaling the technology to have enough thrust to power a boat is not economically feasible.
Maze Robot
Project Date:
2017
Age:
19
Project Type:
Robotics
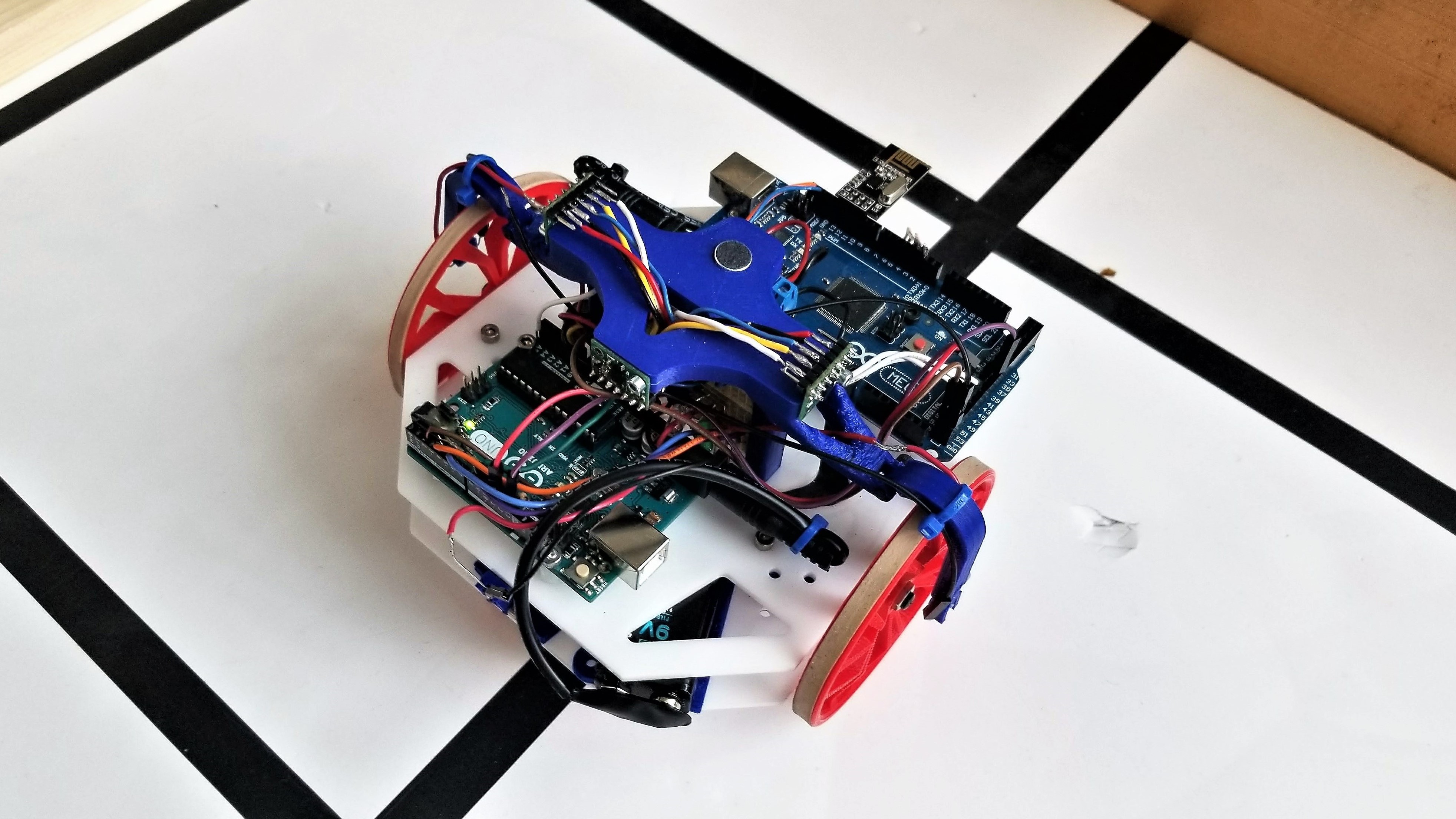
This was a robot we made for one of our electrical and computer engineering classes at Cornell. The goal was for it to autonomously naviagte a maze, and also detect the location of treasure (indicated by specific RF frequencies). This robot, I designed and 3D printed/laser cut all the mechanical components, including the frame, wheels, and sensor mounts. I implemented single point lidar time-of-flight sensors to detect the walls of the maze. I also did the software integration of the light sensors used for line following.
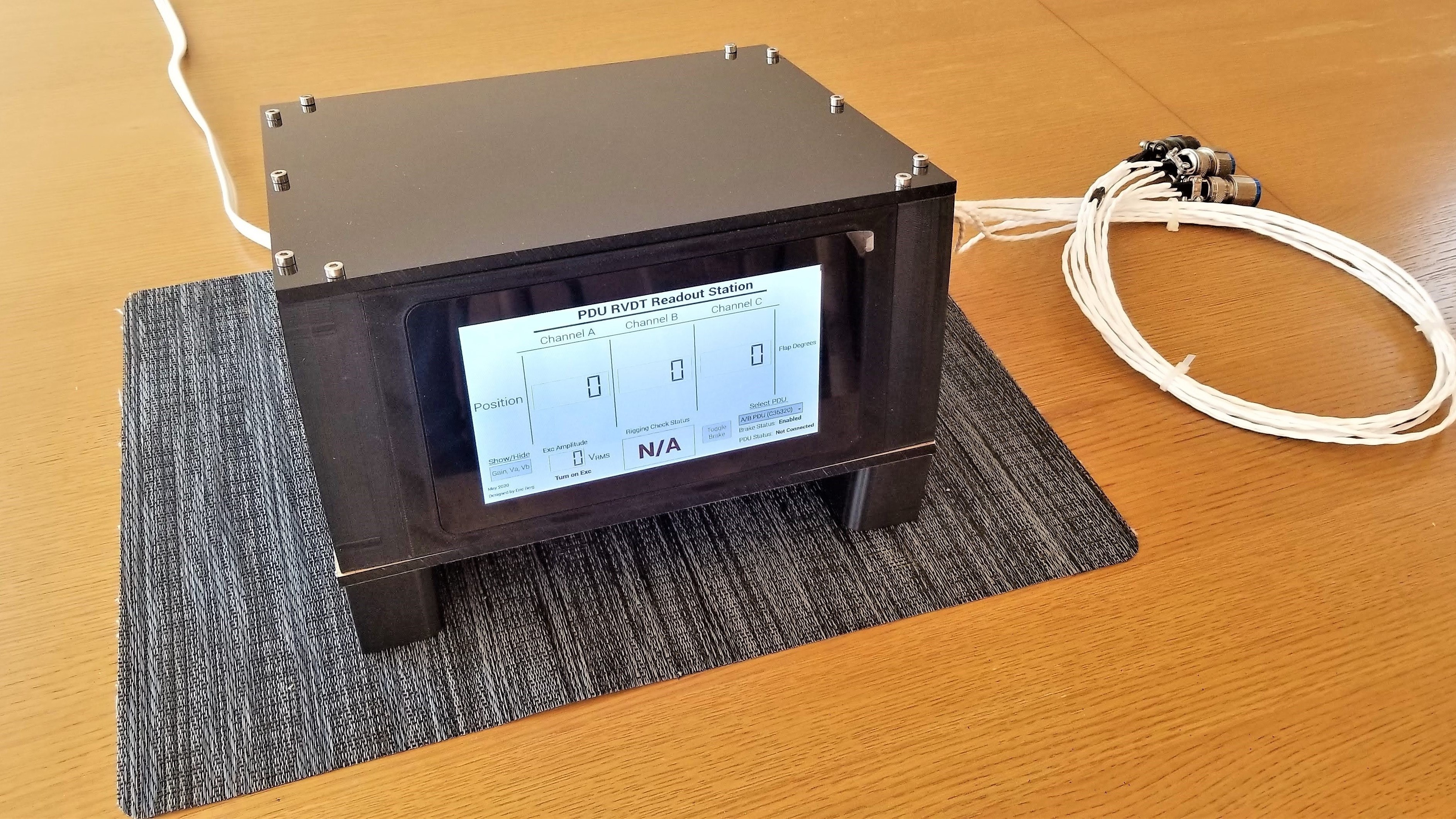
RVDT Rigging Stand
Project Date:
2020
Age:
22
Project Type:
Electronics
This is a test equipment device I designed and built in order to check the rigging of rotarty variable differntial transformers (RVDTs). The build consisted of a Raspberry Pi, a LabJack DAQ, a waveform generator, and a touchscreen interface. The waveform generator excited the RVDT coils wile the DAQ processed the feedback. I designed and integrated of the hardware, software, and GUI for this device.
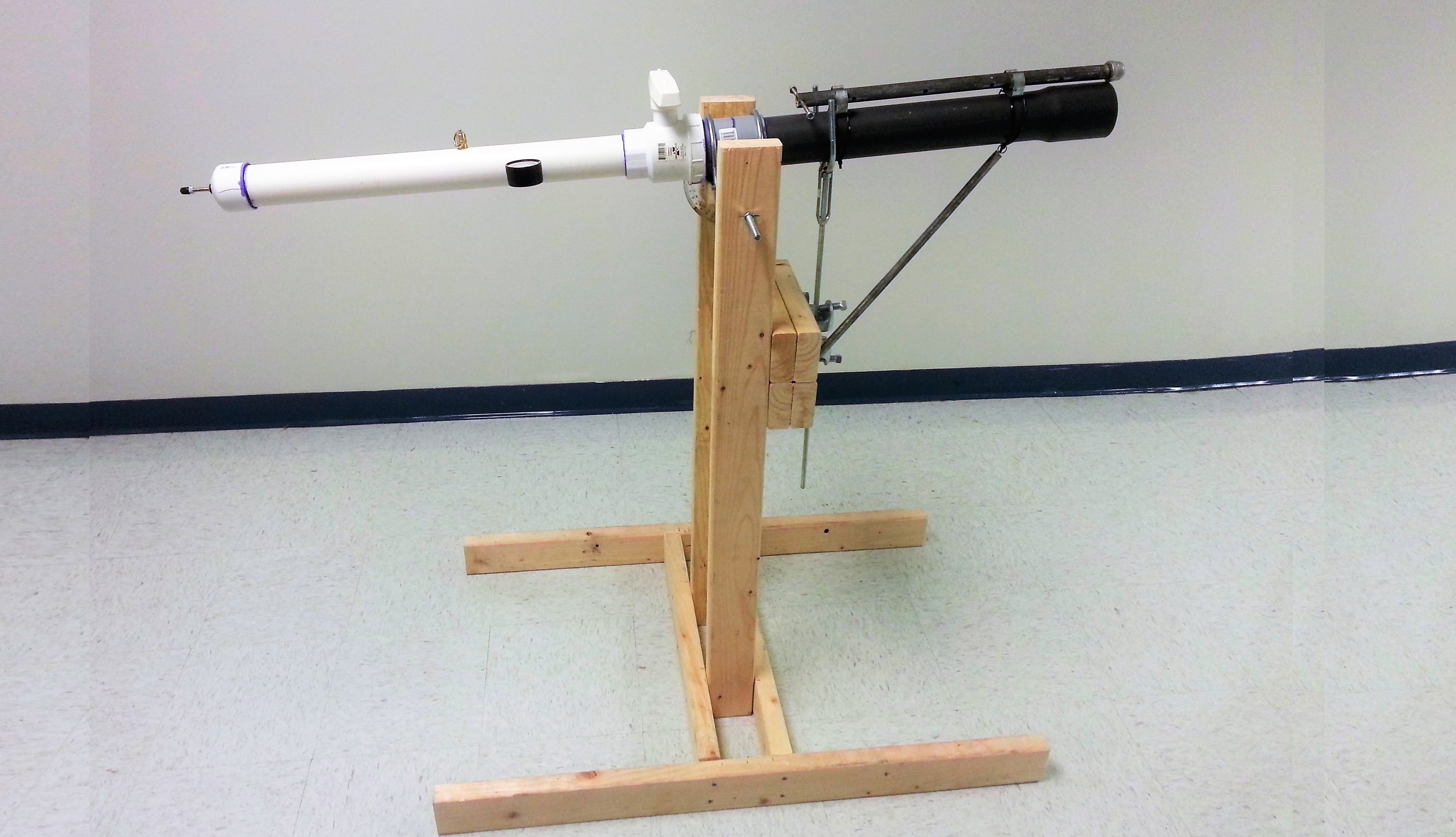
Tennis Ball Cannon
Project Date:
2014
Age:
16
Project Type:
Random
I built this air-powered tennis ball cannon with a friend for a high school physics demonstration on projectile motion.
Joystick Remote Controller
Project Date:
2013
Age:
15
Project Type:
Mechatronics
I built this joystick to serve as a controller for my Lego Mindstorms tanks, cars, and rovers.
Electric Skateboard
Project Date:
2015
Age:
18
Project Type:
Electric-Vehicles , CADvsReal
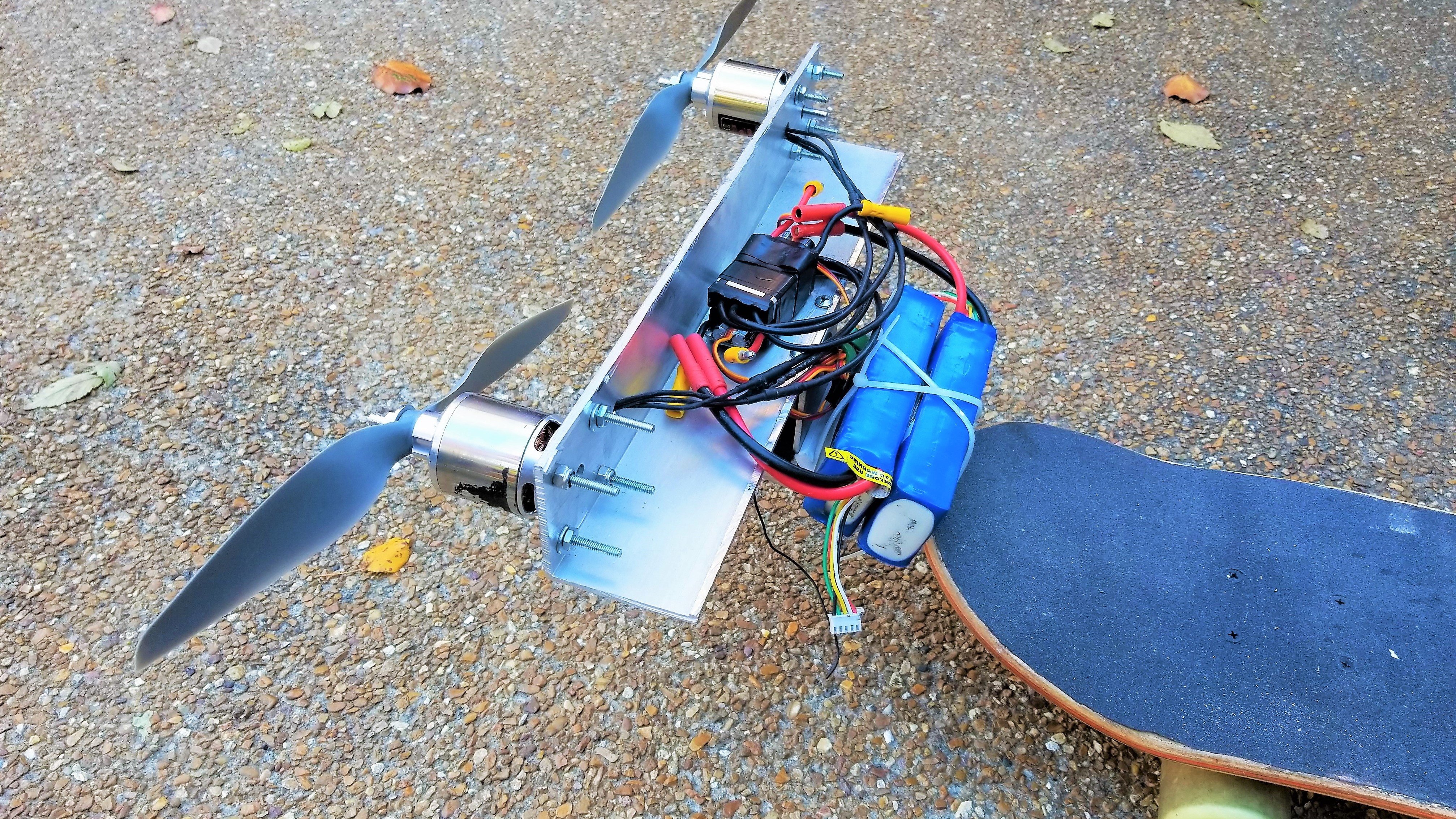
This was one of my homemade electric skateboards called the TriSkate. It is very lightweight, compact, and fast.
Fold Down TV
Project Date:
2024
Age:
26
Project Type:
Mechatronics , Random
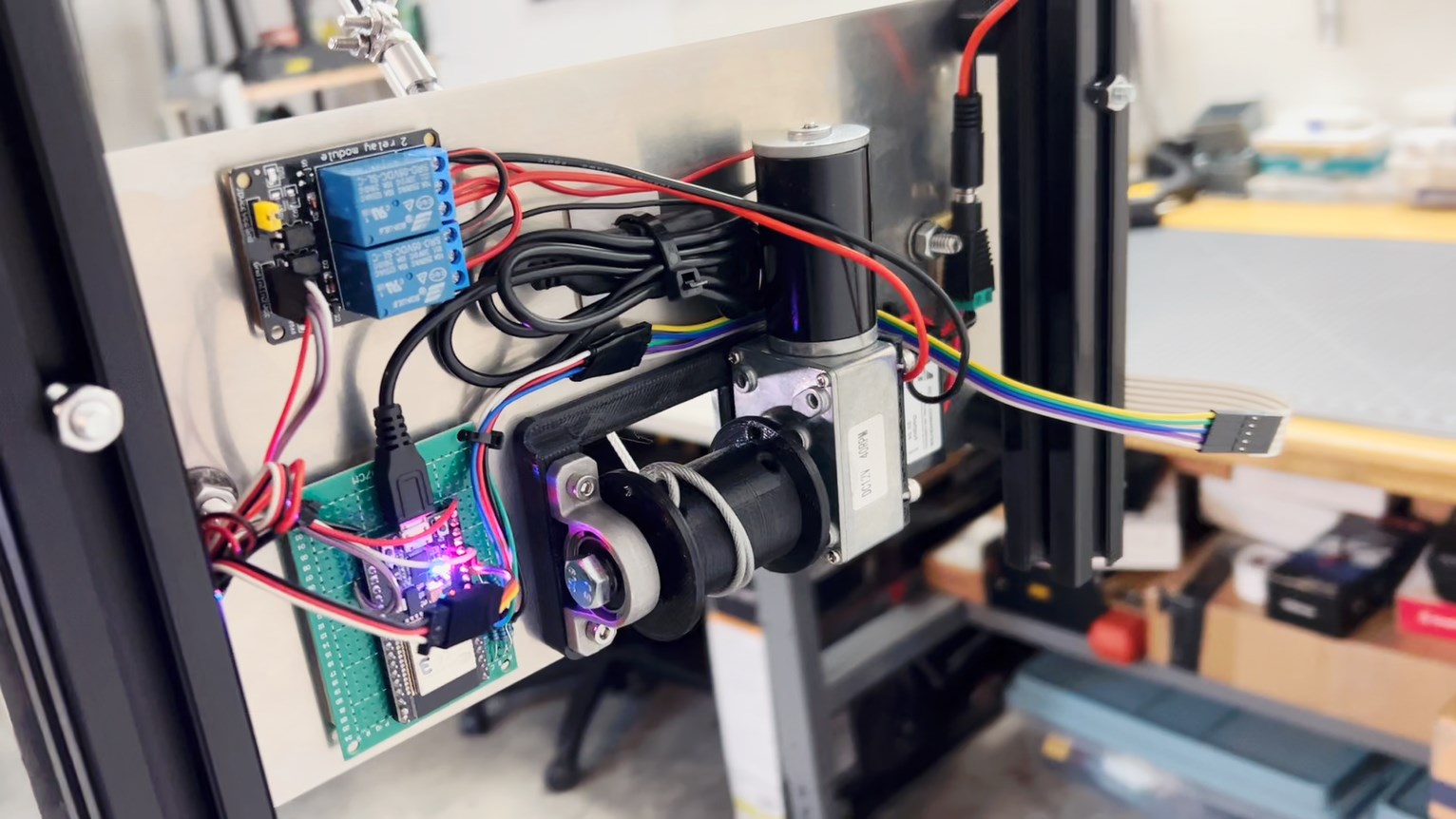
My TV was blocking all the natural light in my living room, so I made it come out of the ceiling. I used a high-torque geared motor and winch design to fold the TV up and down from a small sub frame mounted to the ceiling. I used an ESP32 wifi-enabled microcontroller to control the motor using a 2ch relay module. The TV can be controlled by a wireless remote I built using another ESP32 microcontroller, or using buttons on the back of the TV.